GKDesign is currently developing a biped robot for the University of NSW. The project is lead by Graham Mann in the AI lab. For detailed information about the aims of the biped research please visit Graham's web site.
Each leg of the robot has 5 degrees of freedom which gives it 10 all together. The biped will be actively balanced. The main body of the biped will house the motor controller and I/O communications. The biped will be tethered to a PC that will run all the high-level learning algorithms. The biped will also contain a number of sensors that provide feedback to it about how it is doing. Each joint has a position encoder, the main body houses two accelerometers, and each foot has 4 pressure sensors.
The following sequence of images shows the progression of the mechanical construction of the biped:
Click On an image to enlarge the photo.
|
|
These are most of the raw materials used to build the biped. These consist mostly of aluminium and aluminium alloys in a variety of forms. |

|
The basic building blocks are now complete. The body has been cut out of the large sheet of 2mm aluminium and then bent to shape. The leg bones and feet have also been cut out. The stack of small blocks will be the motor supports. |
|
|
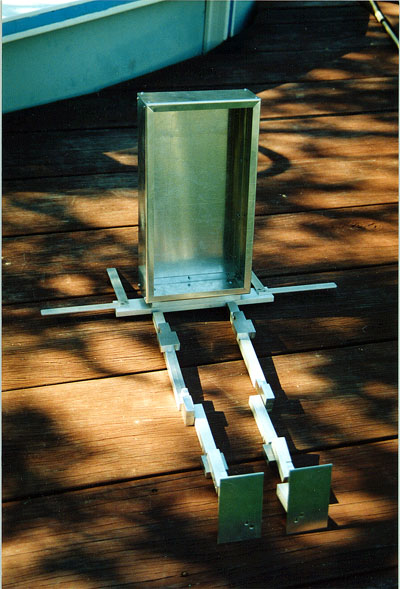
The hip bar has now been created and a first dry run of assembling the legs together, The motors are still missing, but it is beggining to take shape. |
|
|
The motor/gearbox assemblies are being attached to the motor supports and leg bones. Several of the keyed shaft brackets are lying on the inside of the leg. These are machined out of brass. Only the lower 3 motor on the right leg are properly attached. The rest are just posing for the photo. |
|
|
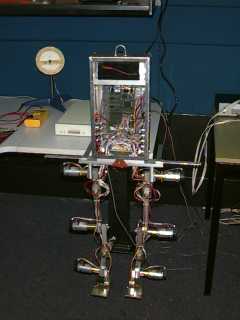
Phase-1 is complete. All major mechanical structures have been built and assembled. The Biped is off to the university to be fitted with cabling and sensors. |
|
|
The Biped now has a name!!! it is called "TarBaby". TarBaby is now wired up with the micro-controller and motor drivers. Each foot also has 4 pressure sensors to help provide balance information feedback. |
[Home] | [Publications] | [Past Projects] | [New Projects] |