

CURI - 3 is a fully autonomous robot developed over a 6 month period in 1994. CURI-3 was developed for the University of New South Wales Artificial Intelligence Lab in Sydney Australia. Designed as a reserach platform CURI-3 is modular and upgradable. The main processing computer on board is a 486DX33 PC with a floppy and hard drive. The PC is equipped with a Creative Labs Video Blaster used for image capture.
The robot has stereo B&W cameras mounted on a 5-DOF 'head'. Each camera is controlled by 2 RC servo motors controlling the pan and tilt. Both cameras are also connected to a 5th servo that acts as the 'neck', and allows both cameras to pan simultaneously. The servos are controlled by a 68HC11 mini board that communicates with the PC through an RS-232 serial line.
The drive mechanism consists of two 12VDC motors that draw about 2A each while operating. Each is geared to provide enough torque. The custom motor driver electronics are connected to the parallel port of the PC. An IR sensor on each axel is used for odometry feedback to the PC.
The PC is also equipped with a sound blaster and stereo speaker for voice recognition and audio feedback.
 The frame is constructed from lengths of aluminium. This photograph
shows the wheels and casters attached to the frame.
The frame is constructed from lengths of aluminium. This photograph
shows the wheels and casters attached to the frame.
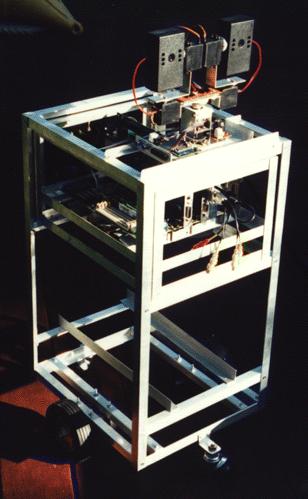
 This back view shows the computer module in place. The camera head is
also attached to the top of the robot. Both the camera head and computer module
are easily removed for servicing. The computer module communicates with the
camera head via a RS-232 serial line.
This back view shows the computer module in place. The camera head is
also attached to the top of the robot. Both the camera head and computer module
are easily removed for servicing. The computer module communicates with the
camera head via a RS-232 serial line.
 This front view shows the camera head detail. Note the six small holes in each camera
case next to to the lens camera. Through these the infrared LEDs illuminate the scene.
At the base of the camera head is a 68HC11 controller that controls the postion of all
5 servos in the camera head. Two video cables lead from the camera head to the Video Blaster
in the computer module.
This front view shows the camera head detail. Note the six small holes in each camera
case next to to the lens camera. Through these the infrared LEDs illuminate the scene.
At the base of the camera head is a 68HC11 controller that controls the postion of all
5 servos in the camera head. Two video cables lead from the camera head to the Video Blaster
in the computer module.
 Front view of CURI-3 fully assembled with cover attached. The 12V car battery can be
seen at the base of the robot. Protective covers are also inctalled over the
camera head controller. Stereo speakers are located at the bottom of the robot. Underneath
the right speaker is the recharge port.
Front view of CURI-3 fully assembled with cover attached. The 12V car battery can be
seen at the base of the robot. Protective covers are also inctalled over the
camera head controller. Stereo speakers are located at the bottom of the robot. Underneath
the right speaker is the recharge port.
 Rear view of CURI-3 with all protective covers installed. The computer control
panel is also visible. The status indicator LEDs, power, reset, and emergency
shutoff switches are all located on the control panel. A 3.5" floppy drive is
located under the control panel. Handles on top of the robot allow it to be carried
when not operational.
Rear view of CURI-3 with all protective covers installed. The computer control
panel is also visible. The status indicator LEDs, power, reset, and emergency
shutoff switches are all located on the control panel. A 3.5" floppy drive is
located under the control panel. Handles on top of the robot allow it to be carried
when not operational.
[Home] | [Publications] | [Past Projects] | [New Projects] |