Robot móvil basado en PC 386

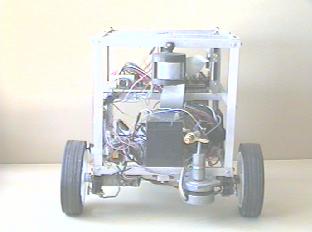


Es una PC 386 SX con 8 Mb de RAM y floppy de 3 1/2 pulgadas. Su planta propulsora consta de dos motorreductores que combinados definen la dirección en que se desplaza este robót. Para controlar el movimiento se desarrollaron 2 codificadores ópticos que envian pulsos para que el soft controle el movimiento. Para no depender de cables se alimenta de baterías de 12V/7Ah y una fuente especial . Tiene sensores de luz, de movimiento y estamos rehaciendo su paragolpes electrónico. Todavía hay mucho para hacer, pero ya nos permite realizar programas para aprender, errar, practicar, etc.

