Introduction to Algebraic Motors
Motor languageBefore mathematics, consider the language context of the term "motor": Motive power is the first meaning of motor. Power-driven equipment evolved in stages through the human and animal traction, river-flow, steam, electrical and internal combustion phases. The electro-chemical “fuelcell reaction”:
2H2+ O2→ 2 ( H2O )+ energy
is still in commercial start-up (2009), though this reaction promises clean driving power (assuming hydrogen is cleanly produced, say by photovolaic-powered electrolysis). In transportation, the drivers were “engines” in the time of steam, then “motors” for electrical propulsion, and commonly for cars. But formally, the “internal combustion engine” (i.c.e.) harkens back to the steam-age word. In electronics, a voltage difference is refered to as an electromotive force, an E.M.F. Similarly, in physiology the "motor neurons" are those that control the power of locomotion. Moreover, the concept of "motivation" is key to many branches of psychology.
The word “motor” evolved into common English usage not only in applied science as stated, but also in mathematical writing. Clearly it forms a variant to "rotor", an interpretation of the square-root minus one operator i which introduces a 90 degree counter-clockwise rotation when acting on the complex number plane C.
One of the most incisive expressions came from Mario Pieri: he used the concept of "a motion" to replace the congruence concept underlying geometry since Euclid. Pieri's convention follows the "transformation" approach in modern geometry promoted by Felix Klein, Sophus Lie, Isaak Yaglom and other writers.
Source of algebraic motors
With James Cockle's answers to the quaternions, and the introduction of Cayley's matrix multiplication in the 1850's, the notion or concept of "number" required extension:
Exercise: Compute the squares of the following matrices:

Such matrices were called motors in the nineteenth century by W.K. Clifford and Alexander MacAulay. Their definitive property m2 = 1 ( identity matrix ) makes m a motor, but m = 1 and m = − 1 are considered excluded so that motors did not exist in algebra until matrices came to play.
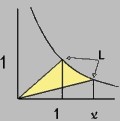
These algebraic entities contribute to the description of the geometric concept of hyperbolic angle: The hyperbolic angle is the independent variable of the transcendental functions sinh (hyperbolic sine) and cosh (hyperbolic cosine) which are so useful in mathematical models. In fact, attention to the basic concepts of "motor" and "hyperbolic angle" serves to provide these models with a descriptive foundation.