![]()
Principio de Funcionamiento
![]()
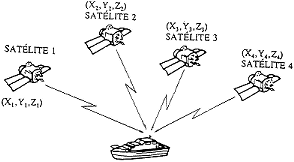
El sistema GPS
tiene por objetivo calcular la posición de un punto cualquiera en un espacio de
coordenadas (x,y,z) [3], partiendo del cálculo de las distancias del punto a un
mínimo de tres satélites cuya localización es conocida.
La distancia
entre el usuario (receptor GPS) y un satélite se mide multiplicando el tiempo de
vuelo de la seńal emitida desde el satélite por su velocidad de
propagación.,Para medir el tiempo de vuelo de la seńal de radio es necesario que
los, relojes de los satélites y de los receptores estén sincronizados, pues
deben generar simultáneamente el mismo código. Ahora bien, mientras los relojes
de los satélites son muy precisos los de los receptores son osciladores de
cuarzo de bajo coste y por tanto imprecisos. Las distancias con errores debidos
al sincronismo se denominan pseudo distancias. La desviación en los relojes de
los receptores ańade una incógnita más que hace necesario un mínimo de cuatro
satélites para estimar correctamente las posiciones .En el cálculo de las pseudo
distancias hay que tener en cuenta que las seńales GPS son muy débiles y se
hallan inmersas en el ruido de fondo inherente al planeta en la banda de radio.
Este ruido
natural está formado por una serie de pulsos aleatorios, lo que motiva la
generación de un código pseudo aleatorio artificial por los receptores GPS como
patrón de fluctuaciones. En cada instante un satélite transmite una seńal con el
mismo patrón que la serie pseudoaleatoria generada por el receptor. En base a
esta sincronización, el receptor calcula la distancia realizando un
desplazamiento temporal de su código pseudo aleatorio hasta lograr la
coincidencia con el código recibido; este desplazamiento corresponde al tiempo
de vuelo de la seńal, Este proceso se realiza de forma automática, continua e
instantánea en cada receptor.
La
utilización de estos códigos pseudo aleatorios permite el control de acceso al
sistema de satélites, de forma que en situaciones conflictivas se podría cambiar
el código, obligando a todos los satélites a utilizar una banda de frecuencia
única sin interferencias pues cada satélite posee un código GPS propio. Aunque
la velocidad de los satélites es elevada (4 km/s), la posición instantánea de
los mismos puede estimarse con un error inferior a varios metros en base a una
predicción sobre las posiciones anteriores en un período de 24 a 48 horas. Las
estaciones terrestres revisan periódicamente los relojes atómicos de los
satélites, dos de cesio y dos de rubidio, enviando las efemérides y las
correcciones de los relojes, ya que la precisión de los relojes y la estabilidad
de la trayectoria de los satélites son claves en el funcionamiento del sistema
GPS.
El sistema NAVSTAR-GPS se basa en la medida simultánea de la distancia entre el receptor y al menos 4 satélites.
Las coordenadas, tanto de los satélites como de los usuarios que se posicionan con el sistema GPS, están referidas al sistema de referencia WGS84 (Sistema Geodésico Mundial de 1984). Estas coordenadas pueden ser cartesianas en el espacio respecto al centro de masas de la Tierra (X, Y, Z) o geodésicas (j, l, h). El sistema tiene las siguientes características:
- Origen en el Centro de Masas de la Tierra.
- El eje Z es paralelo al polo medio.
- El eje X es la intersección del meridiano de Greenwich y el plano del ecuador.
- El eje Y es perpendicular a los ejes Z y X, y coincidente con ellos en el Centro de Masas terrestre.
|
|
El
sistema ofrece las siguientes informaciones:
Posición del receptor.
Referencia temporal muy precisa. Las distancias entre el
receptor y el satélite se obtienen por medio del retardo temporal entre
que el satélite envía la seńal hasta que el receptor la recibe. |
Más adelante se mostrara como se emplea la técnica de la medida de los retardos temporales:
Se obtiene la ecuación de un esferoide (1 ecuación por cada satélite).
La intersección de todos estos esferoides dá la posición del usuario.
Los
satélites emiten dos portadoras a la misma frecuenci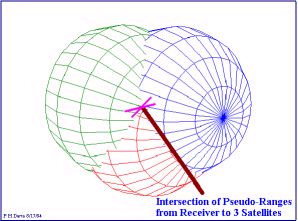 a. Estas portadoras están
moduladas en fase (BPSK) por diferentes códigos pseudoaleatorios.
a. Estas portadoras están
moduladas en fase (BPSK) por diferentes códigos pseudoaleatorios.
El receptor GPS calcula la correlación entre el código recibido y el código
del satélite cuya seńal pretende detectar, de esta forma:
Se pueden separar las seńales de los diferentes satélites.
Y finalmente se obtiene el retardo temporal.
![]()
Sistema de Medida
![]()
Se puede realizar la medición de distancias de tres formas diferentes :
Por Cuenta Doppler
Por Pseudo Distancias
Por Medida de diferencia de Fase
Por Cuenta DOPPLER
La cuenta DOPPLER se basa en la medición del desplazamiento o corrimiento Doppler, que consiste en la variación aparente en el valor de la frecuencia en función de la velocidad de acercamiento o alejamiento de la fuente emisora.
Esta información será ampliada en la pagina #5 de esta monografía.
Por Pseudo Distancias
El método de las pseudodistancias es exclusivo de la técnica G.P.S. Se trata de una multilateralización tridimensional que sitúa la estación en la intersección de unas esferas con centro en el satélite y radio de la distancia correspondiente. Este sistema se emplea en navegación y permite el posicionamiento continuo en tiempo real.
La pseudodistancia es el resultado de multiplicar la velocidad de la luz por el desplazamiento temporal necesario para alinear (correlar) una réplica del código G.P.S. generado en el receptor, con la seńal procedente del satélite G.P.S.
Dos códigos incorrelados
El receptor tiene en su memoria la estructura del código en cuestión, y genera una réplica exacta. Entonces compara la modulación de la seńal recibida con la réplica del código generada en el instrumento, detectándose si ambos están precisamente sincronizados.
Para sincronizar la réplica con el original recibido, el instrumento va aplicando un retardo. Cuando el código recibido y la réplica generada tienen la misma forma (igualación) se mide el tiempo de retardo, que permite calcular una distancia, que no será precisamente la existente ya que, aunque se sabe el momento de emisión del satélite, porque el estado y marcha del reloj del satélite son conocidos por el mensaje, no se conoce el estado del reloj del receptor (introduce un sesgo). Por eso el valor hallado no es una distancia, sino una pseudodistancia.
Dos códigos semicorrelados
Para calcular la posición hacen falta las mediciones de cuatro satélites, ya que no se conocen las tres dimensiones temporales y la incertidumbre que introduce el sesgo del reloj del receptor (habitualmente es un oscilador de cuarzo que es de menor calidad que los relojes atómicos de los satélites, supervisados por la estación de control). La intersección de las esferas centradas en los satélites y con radio igual a la pseudodistancia medida da la posición del receptor.
Si el estado es conocido (usando un patrón
atómico), o la altitud (navegación marítima), con sólo tres satélites se
resuelve el posicionamiento tridimensional al dejar sólo 3 incógnitas. Si el
código utilizado es el código C/A, cuya frecuencia de modulación es de 1,023 MHz
(y por tanto su longitud de onda es de aproximadamente 300 metros) se pueden
sufrir errores de algún decámetro, pero en tiempo real.
Dos códigos correlados
El código P cuya frecuencia es 10,23 MHz tiene una longitud de onda de sólo 30 metros (10 veces menor que el C/A); por ello los errores son del orden de algún metro, aunque no puede correlarse, a no ser que el receptor genere la réplica y se sepa en qué momento casi exacto se encuentra, consiguiéndose esto último con los datos correspondientes de la palabra HOW del mensaje.
En cualquier caso, el código P puede
permitir a un avión de combate o a un mísil, mientras vuela a 2 veces la
velocidad del sonido (2 mach), el posicionamiento en tiempo real con precisión
de orden métrico. Para usos geodésicos carece de interés esta posibilidad,
siendo suficiente el uso del C/A para un breve posicionamiento aproximado,
automático en los instrumentos modernos, previo a la observación por medida de
fase.
Por Medida de diferencia de Fase
Este método es el que permite la máxima precisión. Para ello se emplea una frecuencia de referencia, obtenida del oscilador que controla el receptor, que se compara con la portadora demodulada que se ha conseguido tras la correlación, o bien sobre su armónico conseguido por el método de cuadratura (visto en el sector de usuario). La base del método es que se controla en fase una emisión radioeléctrica hecha desde el satélite con frecuencia conocida y desde posición conocida.
Al controlar en fase, lo que se hace es observar continuamente la evolución del desfase entre la seńal recibida y la generada en el receptor; el observable es el desfase, y éste cambia según lo hace la distancia satélite-antena receptora.
Diferencia de fase entre dos receptores
Cuando llega a la antena, la onda portadora habrá recorrido una distancia D, correspondiente a un cierto número entero N de sus longitudes de onda, llamado ambigüedad, más una cierta parte de longitud de onda. Lo observable es esta parte de la longitud de onda y puede valer entre 0 y 360 grados sexagesimales. Cuando va creciendo y llega a 360 el valor de N aumenta en una unidad y dicho valor pasa a valer 0. Contrariamente sucede al revés.
Pensemos que ya que la longitud de onda de la L1 es de 20 cm. y que al poder apreciar el incremento de fase con precisión mejor del 1% la resolución interna es de orden milimétrico. Además la distancia (y por tanto la fase y incremento de fase entre 0 y 360 grados sexagesimales) está variando continuamente aunque de forma controlada por la contínua comparación de fase.
La resolución de la ambigüedad se hace en el proceso de cálculo; y no sólo esta incógnita, sino las otras que tenemos que son los estados de los relojes y por supuesto los tres incrementos de coordenadas entre receptores.
Es fundamental en el sistema no perder el seguimiento de la fase para que la ambigüedad inicial no pueda variar. Si hay una pérdida de recepción por cualquier causa la cuenta de ciclos se rompe y tenemos una pérdida de ciclos o cycle slip, talón de Aquiles del método, aunque mediante un ajuste polinómico en postproceso, es posible restaurar la cuenta original y recuperar la ambigüedad inicial.
Este método se emplea para posicionamiento relativo, entre dos receptores que toman la diferencia de fase al mismo satélite y que pueden comunicarse para obtener sus coordenadas relativas.
Posicionamiento relativo
La pérdida de ciclos puede ocurrir por muchas causas: paso de un avión, relámpago, disturbios ionosféricos, torpeza del operador, etc. Pensemos que, dada su lejanía y poco volúmen físico, la fuente radiante (antena del satélite) se puede considerar puntual, por lo que carece de penumbra radioeléctrica. Se comprende claramente la dificultad de trabajar en cercanías de arbolado, tendidos eléctricos, estructuras, torres, etc.
Aplicando este sistema de observación a dos estaciones, refiriéndonos al posicionamiento relativo, podemos hacer las siguientes afirmaciones:
![]()
| | | | | | | | |