Redes de ordenadores y comunicaciones
|
Redes de ordenadores y comunicaciones | ||
Este tema está dirigido a usuarios de ordenadores no iniciados
en redes y comunicaciones. No es una introducción exhaustiva a las redes de
ordenadores, sin embargo aporta una base suficiente y razonable sobre los
conceptos generales y tecnologías comunes a la mayoría de redes y
comunicaciones.
Durante el siglo pasado se desarrollaron una gran
variedad de redes de comunicaciones, hasta alcanzar la situación actual, en la
que rodean el globo y se extienden por el espacio. La radio, la televisión y el
teléfono permiten que millones de personas estén en contacto, a menudo salvando
distancias de miles de kilómetros.
Aunque los primeros sistemas de
comunicación, como el telégrafo, utilizaban un código
 digital
(el código Morse) para transmitir la información, el mayor peso de los
desarrollos necesarios para dar lugar a estas redes de comunicación ha ido
dirigido hacia la transmisión de voz e imagen, de forma analógica. Con la
llegada de los ordenadores, la situación ha cambiado de nuevo. La información se
envía en forma digital, cada vez en cantidades mayores. La combinación de
ordenadores y redes de comunicaciones es una de las principales áreas de
desarrollo en la actualidad, teniendo un impacto tan profundo en el estilo de
vida de millones de personas como lo tuvieron la radio y el teléfono en su
momento.
digital
(el código Morse) para transmitir la información, el mayor peso de los
desarrollos necesarios para dar lugar a estas redes de comunicación ha ido
dirigido hacia la transmisión de voz e imagen, de forma analógica. Con la
llegada de los ordenadores, la situación ha cambiado de nuevo. La información se
envía en forma digital, cada vez en cantidades mayores. La combinación de
ordenadores y redes de comunicaciones es una de las principales áreas de
desarrollo en la actualidad, teniendo un impacto tan profundo en el estilo de
vida de millones de personas como lo tuvieron la radio y el teléfono en su
momento.
Un proceso cualquiera de comunicación está constituido por un
EMISOR que envía INFORMACIÓN
a través de un CANAL de transmisión, la cual
es recibida por un RECEPTOR. Podemos por tanto,
hablar de comunicación oral, escrita, etc., donde el canal será respectivamente
el aire, el papel, etc.
La información no es transmitida directamente,
sino que se utilizan unos CODIGOS entendibles por el
emisor y el receptor, y que se comunica mediante SEÑALES físicas. Los códigos serán el lenguaje utilizado y
las señales las ondas sonoras, luminosas, etc.
En muchos casos, la
utilización de códigos y señales exigirá que la información sea CODIFICADA en la transmisión y DECODIFICADA en la recepción. Es decir, pueden ser
codificadores/decodificadores los sentidos, los traductores, etc.
El
objetivo de un proceso de comunicación es que la información que se quiere
transmitir sea idéntica a la que se recibe. Si falla cualquiera de los elementos
que intervienen (transmisor, canal de transmisión o receptor), se producen
pérdidas de información; para intentar evitarlo, se repiten los mensajes en su
totalidad o en parte (redundancia), o se acompañan de códigos especiales (de
control) que permitan reconstruir la información.
La comunicación suele
ser en ambas direcciones alternativa o simultáneamente, convirtiéndose el
transmisor en receptor y viceversa.
Lo dicho de una forma general lo
podemos extrapolar al mundo informático, con la intervención de diferentes
máquinas que comunicarán las informaciones a diversos tipos de receptores.
Las principales razones de ser de las comunicaciones informáticas
son:
Estas necesidades han conducido al gran desarrollo de las REDES
de comunicaciones. Veremos cómo es posible conectar ordenadores y terminales. Un
terminal puede ser "tonto" o inteligente. El primero consiste prácticamente en
un monitor y un teclado, y el segundo es un ordenador completo, es decir, se
diferencian en que el terminal inteligente posee capacidad de proceso de
información de forma autónoma.
Las redes se distinguen primeramente por
la distancia existente entre sus terminales, clasificándose en:
Como medio físico o canal de comunicación se usan el aire o
cables (par trenzado, coaxial y fibra óptica). No se puede hablar de uno mejor
que otro, sino de cuál es el más adecuado a cada necesidad y dependerá de las
prestaciones, coste, fiabilidad de instalación y capacidad de integración con
otros sistemas.
Se diferencian también por la velocidad de transmisión.
Esta se mide en bits por segundo frecuentemente confundida con baudios.
El baudio es una unidad de velocidad de señalización, o de modulación,
igual al número de condiciones discretas o símbolos que se suceden en la línea,
por segundo. La velocidad de transmisión en baudios coincide con la velocidad de
transmisión en bit/s, sólo si cada símbolo representa un bit. Un baudio es el
inverso del intervalo del pulso más corto de señalización medido en segundos.
Un modem que transmite bits a una velocidad de 2400 bit/s, mediante un
sistema de modulación cuaternario por modulación de fase, transmite 1200
símbolos por segundo, y por lo tanto la velocidad de modulación es de 1200
baudios. Un sistema que no emplee bit de parada ni de arranque tiene una
velocidad de transmisión en bit/s igual a la velocidad de modulación en baudios.
Un sistema de transmisión de 5 bit, con un pulso de arranque de 13.5 ms y un
pulso de parada de 19 ms, con una duración total par el carácter de 100 ms,
tiene una velocidad de señalización o modulación de:
El intercambio de información entre los distintos dispositivos
tiene que estar regido por unos PROTOCOLOS, o
lenguajes de diálogo que lo regulen. Consisten en un conjunto de normas comunes
para establecer la comunicación tanto para el receptor como para el emisor.
Desde el comienzo de la industria informática, cada fabricante intentaba idear
una serie de procedimientos, con los cuales podía controlar la información y así
monopolizar el mercado de las ventas de los distintos elementos que componen la
informática. Con el paso del tiempo esta industria se ha extendido tanto, que
surge la necesidad de compatibilizar los procedimientos de la información.
Actualmente existen asociaciones de fabricantes de ordenadores, y organizaciones
internacionales como por ejemplo ISO, que establecen
unas recomendaciones sobre los procedimientos normalizados de comunicación, que
van a gobernar ese intercambio de información. Un protocolo es pues, un conjunto
de procedimientos normalizados o estandarizados que gobiernan el intercambio de
comunicaciones, acuerdos o convenios que se adoptan para poder establecer una
comunicación correcta; afectan a las frecuencias de las señales, reconocimiento
de la conexión, código de recepción y emisión, control de errores, control de la
sincronía, inicio de las operaciones, establecimiento de los caminos por lo que
irán los mensajes, asegurar que los datos han sido recibidos, etc.![]()
8.2 ¿Qué es una red de ordenadores?
Una red
de ordenadores es una colección de máquinas que pueden almacenar y manipular
datos electrónicos, interconectadas de forma que sus usuarios pueden almacenar,
recuperar y compartir información con los demás. Las máquinas conectadas pueden
ser, microordenadores, miniordenadores, grandes ordenadores, terminales,
impresoras, dispositivos de almacenamiento, entre otros.
En una red de
ordenadores se puede almacenar cualquier información, incluyendo textos,
imágenes, mensajes de voz e imágenes visuales como por ejemplo fotos.
Como se ha visto las redes aportan beneficios, dándose seguidamente una
descripción de los más habituales:
A) Compartir
información de forma flexible.
Una red de ordenadores permite
a los usuarios compartir instantáneamente y sin esfuerzo la información.
Por ejemplo, un editor de libros, escritores, asociaciones de editores y
artistas pueden necesitar trabajar conjuntamente en una publicación. Mediante
una red pueden compartir los mismos archivos electrónicos, cada uno desde su
ordenador y transferir y copiar archivos. Estos pueden añadir material
simultáneamente a los ficheros, o eliminar partes, sin interrumpir el trabajo de
los demás. Las ventajas son evidentes.
B)
Libertad para elegir la herramienta adecuada.
Si se opta por
un entorno de red abierto, esto añade otra dimensión a las capacidades de
compartir información inherente a la red. Esto permite trabajar con el
equipamiento que más satisfaga a las necesidades del usuario. Por ejemplo en una
red abierta a los estándares internacionales, pueden estar trabajando unos
usuarios bajo entornos Windows de PCs, mientras que otros lo pueden estar
haciendo simultáneamente bajo UNIX®, en estaciones de trabajo o
incluso desde otros PCs.
C) Reducción de costos
al compartir equipamiento
Una razón muy importante para
disponer de una red de área local es el compartir equipamiento, lo cual implica
grandes beneficios. Por ejemplo, en una red de veinte microordenadores, se puede
disponer de una impresora laser de alta calidad y en color, para todo el
conjunto, por lo que el ahorro sería considerable frente a la opción de que los
veinte equipos no estuvieran conectados en red, e incluso dado el coste de este
tipo de impresoras sería económicamente inviable el que cada usuario tuviera una
de estas impresoras.
Lo mismo que se ha visto en el caso previo, de la
impresora de alta calidad, se puede concluir de otros dispositivos, como por
ejemplo un grabador de CD-ROM, un escaner en color de alta resolución o un
sistema de fax/modem. En una situación de red se puede compartir cada uno de
estos equipos, mientras que aisladamente sería improbable el que dispusiera cada
usuario de ellos.
D) Uso flexible de la potencia
de computación
Una de las ventajas más claras de una red, es
la posibilidad de usar la potencia de un equipo de la red, distinto al que
estamos trabajando. Por ejemplo si se han de realizar cálculos matemáticos o de
ingeniería complicados, se podrá acceder desde un punto de red, al equipo de
dicho entorno que tenga potencia y rapidez suficiente para realizar estos
trabajos en un tiempo razonable.
Otra alternativa es el procesamiento
paralelo, es decir resolver el problema de cálculo mediante el trabajo
simultáneo de varios equipos de la red. Algunos programas son demasiado
complicados para poder ejecutarse en microordenadores individuales, o tardarían
mucho tiempo, pero mediante el procesamiento paralelo entre los diversos equipos
de la red se aceleraría mucho el cálculo.
E)
Comunicación efectiva y fácil con todo el mundo
Mediante las
redes de área geográficas, se pueden interconectar redes de área local a escala
mundial. De esta forma se puede transferir información, prácticamente de forma
instantánea, a cualquier lugar. ![]()
8.3 Topología
de red y tipos de redes
8.3.1 Datos
frente a Información
Aunque rutinariamente se intercambian ambos
términos, técnicamente no son lo mismo. Datos son entidades con un significado
dado, son la forma de representar la información, pero no la información en sí
misma.
Para propósitos habituales la información son datos decodificados
en forma legible. Por ejemplo, los datos de un fichero se pueden decodificar y
mostrar en una pantalla de ordenador o trasladarlos a una impresora.
8.3.2 ¿Cómo se transfieren los datos en una
red?
Para transferir señales entre ordenadores se necesitan: un
medio de transmisión para portar las señales y dispositivos para enviar y
recibir las señales.
A) Medios de transmisión de
la red.
Las señales eléctricas se generan como ondas
electromagnéticas (señales analógicas) o como una secuencia de pulsos de
voltajes (señales digitales). Para propagarse, una señal debe viajar a través de
un medio físico, el llamado medio de transmisión. Hay dos medios de transmisión,
guiados y no guiados.
Los medios guiados se fabrican de forma que las
señales se confinan a un canal de transmisión estrecho y que se puede predecir
su comportamiento. Son habituales, los cables de par trenzado (como lo
telefónicos), cables coaxiales (como los de las antenas de televisión) y cables
de fibra óptica. Ver apéndice sobre cables al final del tema.
Los medios
no guiados son partes del entorno natural, a través de los que se transmiten las
señales bajo forma de ondas. Las frecuencias habituales se corresponden con el
espectro de radioondas (VHF y microondas) u ondas de luz (infrarrojo o visible).
Para planificar una red de ordenadores, se exige un medio de
transmisión, o combinación de ellos, basándose en las circunstancias físicas, a
la construcción de la red y las prestaciones que se requieren de ella. Un
objetivo habitual es guardar el coste al mínimo, sobre la base de las
necesidades planteadas.
B) Dispositivos de
transmisión y recepción.
Una vez que se tiene un medio de
transmisión, se necesitan los dispositivos que propaguen y reciban las señales a
través del medio elegido. Estos pueden ser, adaptadores de red, repetidores,
concentradores, transmisores diversos y receptores.
Adaptadores de red
Se fabrican de diversas formas,
la más habitual es una placa de circuito impreso que se instala directamente en
un zócalo de expansión del ordenador. Otros están diseñados para
microordenadores portátiles, por lo que consisten en un dispositivo pequeño, que
se conecta a la salida de impresora o a una ranura PCMCIA. Estos adaptadores se
fabrican en diversas versiones, de forma que se puedan conectar a cualquier tipo
de medio guiado. También se pueden conectar a dispositivos que puedan transmitir
mediante medios no guiados
Repetidores y Hubs
Se usan para incrementar las distancias a las que se puede propagar una
señal de red. Cuando una señal viaja a través de un medio encuentra resistencia
y gradualmente se hace más débil y distorsionada. Técnicamente este proceso se
denomina atenuación.
Puentes (Bridges)
Permiten conectar una LAN a otra red con diferentes protocolos en los
niveles físico y de enlace, pero siempre que en los niveles superiores usen los
mismos protocolos.
Pasarelas (Gateways)
Se usan para conectar una LAN a otra red que utilice otros protocolos.
Se emplean para conexión entre diferentes redes locales, o entre locales y
ampliadas (WAN).
Concentradores
Se
usan en redes de microordenadores para proporcionar un punto común de conexión
para dispositivos de computación. Todos los concentradores tienen repetidores
Transmisores de microondas
Los
transmisores y receptores de microondas, especialmente satélites, se usan para
transmitir señales a grandes distancias. El medio de transmisión es la
atmósfera. En EE.UU las principales bandas de Microondas autorizadas para
telecomunicaciones fijas están en el rango de frecuencias de 2 GHz a 40 GHz. Las
licencias están concedidas para subrangos inferiores, por ejemplo el Gobierno
Federal tiene una en el rango de 7.125 a 8.40 GHz, mientras que el rango de
10.550 a 10.680 está adjudicado a un usuario privado. A continuación se muestra
un esquema del espectro electromagnético completo: 
La siguiente
figura muestra el proceso de transmisión que sufren las microondas en la
atmósfera, ![]()
Transmisores infrarrojos y
láser
Son análogos a los de microondas. También usan la atmósfera
como medio, sin embargo; sólo son válidos para distancias cortas, ya que la
humedad, niebla, obstáculos y otros fenómenos ambientales pueden causar
problemas de transmisión.
Como ejemplo de transmisión
mediante radiación láser, se puede citar el equipo Canobeam de la empresa
japonesa Canon. Entre las características de este sistema, destacan:
Las redes de área personal (WPAN) como tecnología de tercera
generación, significan un impulso al proceso de convergencia entre las
industrias informática y de comunicaciones. Desde el momento en que los
teléfonos móviles se empiecen a utilizar masivamente como ordenadores se
producirá una reestructuración del mercado. Los sectores de GPS, telefonía
móvil, ordenadores y en general procesadores, dejarán de ser sectores
independientes. Estas redes trabajan en una banda de frecuencias que no necesita
licencia, 2.4 GHz.
Las interferencias constituyen un problema en la tecnología radio en general que se manifiesta activamente en VLAN y también en distancias cortas o WPAN por cuanto trabaja en la banda sin licencia IMS de 2.4 GHz, como la iluminación de estadios y los hornos de microondas tanto dornésticos como industriales. En particular. es de gran relevancia la problemática ligada al efecto de las interferencias en sistemas de radio producidas por los hornos de microondas. El dispositivo fundamental de un horno de microondas es, en lo que respecta a interferencias, el magnetrón de cavidades resonantes. El rnagnetrón cs un tubo oscilador empleado típicamente como oscilador de potencia en el transmisor de los sistemas de radar. En este tubo, el flujo de electrones desde el cátodo al ánodo se controla por medio de un campo magnético creado por un sistema de bobinas o bien un imán permanente ubicado en el magnetrón. El comportanicnto de un magnetrón se puede analizar con relativa facilidad mediante procedimientos gráficos que, en esencia, se reducen a dos tipos: diagrama que relaciona mutuamente la intensidad de campo magnético, la corriente en el magnetrón, la variación de frecuencia, y la tensión cntre ánodo v cátodo, así como cl rendimiento; y diagrama de Rieke, que proporciona la relación existente entre la impedancia de carga y la frecuencia, por un lado, y el rendimiento, por otro Estos magnetrones de hornos de microondas son equipos de pequcña potencia en comparación con los magnetrones utilizados en radar. Tipicamente, la potencia de salida de un rnagnetrón de horno de microondas está comprendida aproximadamente entre 650 y 3000 watios. Los hornos de microondas pueden emitir legalmente niveles significativos de fugas en las bandas ISM dentro de los límites establecidos por las normas de seguridad internacionales. Cualquier utilización de sistemas de radio en estas handas se debe basar, por tanto, en acuerdos ad hoc con la industria de las comunicaciones. Un aspecto clave del tema de las interferencias en este contexto viene dado por el hecho de que magnetrones y hornos de microondas se diseñan para que funcionen en la región del diagrama de Rieke, donde tiene lugar la intersección de todas las lineas de frecuencia. |
Un ejemplo es el consorcio Bluetooh, que es un grupo de
inetreés especial y consorcio promotor que agrupa a fabricantes en estos campos.
Bluetooh es una tecnología desarrollada por Ericsson, que se aplica a todos los
dsipositivos que conforman el escenario inalámbrico, para usuarios: ordenadores
portátiles, teléfonos y dispositivos de mano, como por ejemplo PDA (asistentes
digitales personales).
El usuario, en el futuro, ya no utilizará un
teléfono, un ordenador portátil o alguno de lso dispositivos presenets en el
mercado, sino un equipo comunicador.
BLUETOOTH La tecnología Bluetooth se implementa en un chip que se integra en los diferentes equipos que conforman el entorno inalámbrico actual, como ordenadores portátiles, periféricos (ratón, impresoras...), PDA (Personal Digital Assistants) o teléfonos móviles, así como el futuro, en el que se contemplan, además de estos equipos clásicos del ámbito de la comunicación y 1a informática, otros del ámbito de la domótica. Se tiene así lo que se conoce como productos Bluetooth o Bluctooth enabled. El punto clave del chip es el transceiver o transceptor, que ha de ser de muy pequeño tamaño (para no aumentar el tamaño del chip y poder integrarlo con facilidad en los productos) y de muy baja potencia. Otra parte del chip es el circuito integrado de radiofrecuencia. Este circuito integrado tiene capacidad de autorregulación, lo que confiere un factor de ahorro de potencia, característica que es consustancial a las tecnologías inalámbricas en distancias cortas. En concreto, en el chip Bluetooth el consumo es menor del 3% de la potencia que consume un teléfono móvil. El mecanismo de autorregulación funciona de la siguiente forma: cuando se detecta un receptor a una distancia corta el transmisor del circuito integrado es capaz de alterar la potencia de su propia señal para adaptarla al nivel adecuado; cuando se interrumpe la transmisión o disminuye e1 tráfico el sistema pasa a un estado de baja potencia. En esté estado la verificación de conexión se realiza mediante una serie de señales cortas, es decir, se detectan, de forma periódica, los mensajes de búsqueda. Bluetooth utiliza spread spectrum, en concreto frequency hopping (salto de frecuencia). Estos sistemas de salto de frecuencia dividen la banda de frecuencia en varios canales de salto (hopping). En el transcurso de una conexión se produce una transición brusca o salto de los transceptores de radio de un canal a otro de modo pseudoaleatorio. En sistemas FH, el ancho de banda instantáneo es relativamente reducido, si bien, hablando en términos generales, la dispersión o spread se obtiene a lo largo de la banda de frecuencias completa. Esto da lugar a transceptores de banda estrecha y de coste reducido que se pueden considerar óptimos en ley relativo a inmunidad frente a perturbaciones. Para soslayar este factor se dispone de programas de corrección de errores cuya misión es el restablecimiento de los bits de error. Los enlaces en la capa de banda base de la pila de protocolos en Bluetooth, es decir, los posibles enlaces físicos son SC() (´Synchronous Connection Oriented´) para voz y ACL ('Asynchronous Connectionless Link´) para paquetes de datos. Los paquetes ACL se utilizan únicamente para información en forma de datos, mientras que SCO utiliza paquetes que contiene solamente audio o bien una combinación de audio y datos. Los paquetes en Bluetooth son de formato fijo: contienen un campo de código de acceso con el que se identifica el paquete, una cabecera dedicada a información de control y un campo de carga alternativo. La codificación de voz se realiza mediante la técnica de modulación CVSD (Continuoslv Variable Slope Delta) o modulación continua de inclinación delta, con lo que se consigue un buen nivel de inmunidad a errores de hit, que aparecen como un ruido de fondo. Los mecanismos de seguridad consisten en esquemas de autenticación (el proceso de probar la identidad de un cliente/usuario) basados en un mecanismo de exigencia-respuesta y de encriptación hasacla en cifrado el nivel básico. Bluctooth funciona en una topología de varias picorredes (redes de corto alcance) con las que se pueden obtener conexiones punto a punto y punto a multipunto. De momento, se ha conseguido crear y enlazar de forma ad-hoc hasta 10 picorredes, donde todos los equipos que se encuentran en una misma picorred aparecen sincronizados. El concepto de picorred es clave en Bluetooth: se define como la red formada por dos o más unidades o equipos que compraten un canal. Una unidad controla el tráfico y las otras funcionan como elementos subordinados. Las picorredes pueden, a su vez, enlazarse siguiendo una arquitectura tipica del escenario inalámbrico que se utiliza habitualmente para generar flujos de comunicación mutua entre equipos inalámbricos y que normalmente se crea de forma espontánea sin necesitar un punto de acceso como parte integrante de la red. Un grupo de picorredes enlazadas constituye una red de dispersión. El ancho de banda asociado a Bluetooth, que es de un Mbps, puede llegar a extenderse hasta incluso más de seis Mbps con una topología de 10 picorredes enlazadas. El enlace de radio físico entre las diferentes unidades que forman una picorred se realiza mediante los protocolos que conforman las capas de banda base y de enlace. |
| Para líneas xDSL hay cuatro tipos de posibilidades: DSL asimétrico (ADSL), en el que las velocidades de transmisión son distintas según el sentido. DSL simétrico (SDSL), en el que las velocidades en ambos sentidos son análogas DSL de elevada relación de bits, (HDSL) es como el simétrico, pero con más velocidad (HDSL2) DSL de muy elevada relación de bits, (VDSL) es análogo a ADSL; pero al velocidad está en función de la red. Se alcanzan velocidades de hasta 60 Mbit/s Los principales fabricantes de circuitos integrados para estos dispositivos son: Alcatel Microelectronics, STMicroelectronics, Analog Devices Inc, Lucent Technologies Inc, Globespan Technologies Inc, Virata Corp. y ARM Holding Plc. |
8.3.4 Principales tipos de redes
Al hablar de "hardware" de red no hay más remedio que hablar de las
implementaciones que existen en el mercado de ciertas normas creadas por el IEEE
(Institute of Electrical and Electronics Engineers). Cada una de estas normas
engloba toda una serie de características entre las que destacan la topología,
velocidad de transferencia y tipos de cable. Para no entrar en temas
excesivamente técnicos se describen tres: Arcnet, Ethernet y Token Ring.
ARCNET: Aunque existe una versión de esta red
que utiliza topología bus, la más conocida utiliza topología de estrella
distribuida. Soporta una velocidad de 2.5 Mbit/s suficiente para redes de tamaño
medio. Debido a que tiene un coste bajo y es muy fácil de instalar es el
hardware de red más utilizado en redes pequeñas, aunque cada vez se usa menos.
Sin embargo, por su velocidad y las distancias que soporta, es ideal para redes
medias. Utiliza cable coaxial y soporta una distancia máxima de 6 km.
ETHERNET: Utiliza topología bus. Como su
velocidad de transferencia es alta (10 Mbit/s y las versiones más modernas 100
Mbit/s) puede ser utilizada en redes medias e incluso grandes. Pero, debido a su
método de acceso, las prestaciones pueden caer si el tráfico es muy intenso. Por
ello es recomendable estudiar el tipo de aplicaciones que se van a utilizar en
la red. Fue el primer hardware de red presentado en el mercado, siendo ahora el
más popular. La mayoría de fabricantes de ordenadores tienen implementaciones
sobre Ethernet y gracias a ello, la conectividad con esta red es muy fácil.
Utiliza cable coaxial de dos tipos y en su versión más moderna (10 Base T),
cable UTP. Recomendada para entornos en los que deba convivir con equipos
Digital o comunicaciones TCP/IP Para obtener amplia información sobre esta red
se recomienda visitar la página web de Charles
Espurgeons. Si se desea más información se puede acceder al tutorial de la
empresa Lantronix.
TOKEN RING: Es la red IBM por excelencia.
Cuenta con versiones de 4 y 16 Mbit/s lo que la hacía hasta hace poco tiempo una
de las más rápidas. Por su velocidad y soporte de grandes distancias, es la más
utilizada en redes grandes. Utiliza topología en anillo aunque en realidad el
cable se hace en estrella. Ideal para conectividad con IBM. No se recomienda
para redes muy pequeñas ya que su coste es alto con respecto a las otras dos.
8.3.5 Sistemas Operativos de red
Vistos los diversos niveles OSI,
se puede concluir que hay una complejidad elevada en las tareas de control de
las comunicaciones en una red. El programa que realiza esta tarea se denomina
Sistema Operativo de Red, y ha de cumplir ciertos requerimientos:
8.4 El teléfono y la telefonía
móvil 
El Sacerdote Francés Gauthey, en 1680, propuso a
la Academia de Ciencias de París, un sistema de transmisión de la voz humana
mediante tubos acústicos.
En 1860 el Alemán Phillipp Reis inventó un
aparato al que denominó "Teléfono" (del Griego "hablar a lo lejos") con el cual
logró transmitir sonidos durante breves intervalos de tiempo.
A modo de
curiosidad se dice que el inventor del teléfono fue el monje benedictino
Gauthey, que habiendo detectado la propagación de los sonidos por tubos
metálicos, realizó en 1783 los primeros ensayos de telefonía, empleando como
conductor la tubería de la bomba de vapor de Chaillot, de muchos kilómetros de
longitud.
El 14 de Febrero de 1876, el americano de origen irlandés,
Alexander Grahan Bell presentó una petición de patente de un teléfono, dos horas
antes de que lo hiciera Elisha Gray con un aparato similar. 
El receptor no presentó problemas, aunque sí el emisor. La razón es
que el teléfono se basa en el principio de que una corriente contínua puede
variarse por una resistencia que lo haga en función de las ondas acústicas que
reciba (micrófono) lo que a su vez da lugar a la producción de las mismas en el
receptor (un electroimán con una lámina fina). Fueron muchos los experimentos
para lograr un micrófono eficaz, en 1878 Henry Hummings patentó uno que
consistía en una cavidad parcialmente rellena de carbón que cerraba el circuito
eléctrico, cuya resistencia y por tanto la intensidad que circula por el mismo
es proporcional a la presión de las ondas sonoras, actualmente aún se sigue
utilizando. Es de destacar que Tomas A. Edison
(1847-1931) también contribuyó con inventos al desarrollo del teléfono.

Otros elementos básicos del teléfono son el timbre o
campanilla y el marcador. El primero es un electroimán doble, con una armadura
pivotante que soporta a un martillo que al vibrar golpea a una campana, fue
descubierto por T. Watson y aún sigue en uso, el dial se inventó en el año 1896,
por unos asociados de Strowger.
Los primeros teléfonos incluían su
propia batería para alimentar el circuito, pero en 1894 se impuso la batería
central con un voltaje de 48 V, en uso desde entonces. Al descolgar el auricular
se produce el cierre del circuito y pasa por él una corriente continua,
indicando a la central que se requiere servicio. 
En
España se estableció el teléfono en el año 1877 en Barcelona, traídos desde
Cuba, ya que se importaban directamente de EE.UU.. En 1884 el estado se hace
cargo del monopolio, en 1924 se crea la Compañía Telefónica Nacional de España,
actualmente denominada Telefónica de
España.
En las primeras centrales telefónicas las conexiones entre
usuarios se realizaban directamente por los operarios de la central, lo cual era
muy limitado, pues en cuanto crecía el número de abonados el número de
conexiones era inmanejable. En 1889 Almon B. Strowger, un enterrador de la
ciudad de Kansas, al creer que las llamadas eran desviadas a la competencia, por
parte de los operadores, inventó un sistema automático para la selección del
destinatario. Este principio se ha utilizado muchos años, hasta la aparición de
las centrales electrónicas.
Como ejemplo de un servicio avanzado de
comunicaciones se puede citar el sistema Ibercom de Telefónica de España. Es un
sistema de transmisión de voz y datos dirigido al sector institucional y
empresarial, soportado por tecnología enteramente digital. Permite a los
usuarios disponer de su propia red dentro del sistema Ibercom, haciendo uso
exclusivo de ciertos elementos de transmisión y conmutación, creándose una red
privada virtual (RPV).
La infraestructura básica de Ibercom está
compuesta por dos partes, una es la de acceso cuya función es la de proporcionar
las líneas de voz y datos a sus usuarios, denominada Red de Acceso Ibercom
(RAI), pudiendo estar compuesta de varios Módulos de Red de Accesos Ibercom
(MRAI) distribuidos, a los que se conectan todos los terminales correspondientes
a los servicios de telecomunicación con los que se desee dotar cada dependencia,
y otra, la de interconexión, que está incorporada en la porción de tránsito en
las redes públicas, y a la cual se accede a través de un Centro Frontal (CF),
que realiza el tránsito entre las RAI a él conectadas.
La central
telefónica del organismo que tenga este servicio, es una Ericson MD110, que
consta básicamente de unos módulos denominados Módulos de Interface de Línea
(LIM) controlados por un microprocesador equipado con todos los elementos
necesarios para el tratamiento de las llamadas pudiéndose conectar directamente
dos de ellos o a través del Selector de Grupo (GS) en caso de sistemas mayores.
Cada LIM puede funcionar como un sistema autónomo o como integrante de otro
mayor, realizando la conmutación a un ritmo de 64.5 Mbps, y albergando unas 250
extensiones de voz y datos.
La conexión entre los RAI y el CF se realiza
mediante uno o más enlaces MIC, a 2 Mbps, con cables trenzados, coaxiales, fibra
óptica o radioenlaces.
Los servicios ofrecidos por Ibercom son:
8.4.2 Telefonía Móvil
A) Introducción
En la evolución de las redes de
telecomunicación, una estrategia actual es dotar a los usuarios de movilidad, de
forma que puedan establecer una comunicación desde cualquier lugar. Ello es
posible mediante el empleo de la radio para establecer el enlace entre los
elementos a comunicarse. Como ejemplo usuales se pueden considera los sistemas
GSM y DECT. Seguidamente se describe el concepto "celular" por ser la base de la
mayoría de los sistemas de telefonía vía radio.
Al principio de los
sistemas celulares fueron creados por los laboratorios Bell (AT&T) hace unos
cincuenta años. Un sistema celular se forma al dividir el territorio al que se
pretende dar servicio, en áreas pequeñas o celdas (normalmente hexagonales), de
menor o mayor tamaño, cada una de las cuales está atendida por una estación de
radio. A su vez las células se agrupan en "clusters" o racimos, de forma que el
espectro de frecuencias se pueda utilizar en cada célula nueva, teniendo cuidado
de evitar las interferencias.
Las estructuras que permiten, de forma
ininterrumpida, la cobertura de una zona determinada son configuraciones a modo
de panal de miel basadas en 4, 7, 12 o 21 células.
El número total de
canales por célula se obtiene por la fórmula siguiente, N=(N´ total de
canales)/(Claustro (4, 7, 12, 21). Al ser menor el tamaño de las células mayor
será el número de canales que soporte el sistema.
La siguiente tabla
muestra la primera generación de sistemas celulares analógicos
|
|
|
|
|
| AMPS | EE.UU. |
832 |
30 |
| C-450 | Alemania |
573 |
10 |
| ETACS | Reino Unido |
1240 |
25 |
| JTACS | Japón |
800 |
12.5 |
| NMT-900 | Escandinavia |
1999 |
12.5 |
| NMT-450 | Escandinaviabm |
180 |
25 |
| NTT | Japón |
2400 |
6.25 |
| Radiocom-2000 | Francia |
560 |
12.5 |
| RTMS | Italia |
200 |
25 |
| TACS | Reino Unido |
1000 |
125 |
Respecto a los sistemas digitales, los más difundidos son los
siguientes:
GSM y DCS-1800, en Europa, IS-54 e IS-95 en EE.UU. y PDC
en Japón
B) Sistema NMT
Las primeras
generaciones de este tipo de comunicaciones eran sistemas analógicos, tales como
NMT, TACS, AMPS, etc., con una amplia difusión. Actualmente han surgido sistemas
digitales, como el GSM en Europa, el DAMPS en EE.UU. y JDC y PHP en Japón.
En España la telefonía móvil automática o TMA apareció en el año 1982 en
la modalidad de 450 MHz, tomando como referencia el modelo nórdico NMT. Debido
al éxito del mismo y a la saturación del espectro, Telefónica implantó la
modalidad de 900 MHz.
El sistema NMT (Nordic Mobile Telephony) surgió en
los países escandinavos en 1981, es ideal para cubrir la mayor extensión de
terreno con la menor inversión. La versión NMT 900 permite un mayor número de
canales.
C) Sistema TACS
El sistema
TACS 900 adaptado en Inglaterra el año 1985, deriva del sistema analógico AMPS
americano desarrollado por los laboratorios Bell y comercializado en EE.UU en
1984. Con este sistema se obtiene una mejor calidad del servicio, al mismo
tiempo que mejora la relación señal/ruido por tener una mayor anchura de canal.
Además precisa de equipos más pequeños y baratos.
El sistema TACS (Total
Access Communications System) 900 conocido como TMA 900, es del mismo tipo que
el anterior, analógico multiplexado en frecuencia, pero diferente por utilizar
una tecnología mucho más avanzada y barata, dando mejor calidad de audio, así
como una mejor conmutación al pasar de una a otra célula, ya que la señalización
se realiza fuera de banda, al contrario que NMT, que lo hace dentro de ella,
resultando casi imperceptible el ruido para el usuario, sin embargo sus
estaciones base cubren un rango menor. Emplea la banda de frecuencia de los 900
MHz y cada MHz se divide en 40 semicanales de 25 kHz, por lo que resulta
extremadamente útil, por su gran disponibilidad de canales, para cubrir áreas
urbanas. Dispone de 1320 canales duplex, de los que 21 se dedican exclusivamente
a control (señal digital) y el resto para voz (señal analógica)
D) Sistema GSM
El GSM (Groupe
Spécial Mobile), surge del intento europeo de unificar los 10 sistemas
diferentes existentes, en uno solo, el CEPT (año 1982). 
La
principal ventaja de este sistema es que permite realizar o recibir llamadas en
cualquier país europeo, aún estando en tránsito por ellos; el teléfono se
registra automáticamente en la siguiente red GSM al cambiar de un país a otro,
quedando disponible para su utilización. Al ser criptografiadas todas las
conversaciones, da una gran ventaja, la mayor seguridad frente a escuchas. Otras
ventajas son su menor consumo de energía, las células más pequeñas y la
utilización del espectro de forma más eficiente
MoviStar
El
sistema básico MoviStar incluye el servicio de telefonía móvil, más otras
facilidades y funcionalidades como itinerancia internacional, desvío de
llamadas, buzón de voz, consulta al buzón de voz desde el extranjero, servicio
de recepción y envío de mensajes breves de hasta 160 caracteres en el móvil,
restricciones de llamadas, indicación de llamadas en espera, retención de
llamada, agenda electrónica, facturación detallada, identificación de la línea
llamante, ocultación de identidad, multiconferencia, indicación del coste de la
llamada, límite de crédito o fijación del consumo máximo, números de marcación
fija.
MoviStar Datos añade además las siguientes prestaciones,
comunicación de datos hasta 9600 bit/s, acceso a las redes de paquetes (Iberpac
y UNO) vía X28 y a Internet/Infovía.
MoviStar Fax añade a las funciones
básicas las comunicaciones vía fax de hasta 9600 bit/s.
MoviStar
Corporation, incluye las líneas MoviStar de una empresa en la red privada de
comunicaciones de la misma, permitiendo tratar los móviles como extensiones de
la centralita.
MoviStar Grupo Cerrado, permite a las PYMES formar un
grupo cerrado con todas las líneas MoviStar, de forma que no puedan llamar o ser
llamados fuera del grupo.
Actualmente con más de 9000 antenas cubre casi
toda la población española.
A continuación se muestra un mapa de
cobertura de Vodafone 
La existencia
de competencia por parte de otras operadoras, Vodafoner, y Amena ha dado lugar a que las tarifas de
MoviStar sean más ventajosas que las de la telefonía móvil analógica, donde sólo
opera Moviline.
Próximamente va a aparecer
comercialmente una nueva tecnología universal, UMTS.
EN
España se han adjudicado 4 licencias a las operadoras Airtel Móviles, Amena,
Telefónica Móviles y Xfera, estando prevista su entrada en funcionamiento a lo
largo del año 2002
El siguiente enlace es al Libro
Blanco sobre UMTS
A la red actual GSM se le irán añadiendo nuevas
funcionalidades, antes de la implantación completa de UMTS. Nuevas tecnologías
como HSCSD, GPRS y EDGE
HSCSD (High Speed Circuit Switched Data)
se basa en circuitos conmutados de alta velocidad, proporciona una velocidad de
58 kbit/s. Permite acceder a varios servicios simultáneamente. Es parecida a la
actual RDSI.
GPRS (General Packet Radio
Service) puede llegar a velocidades de 115 kbit/s. Al contrario que HSCSD
que para su implantación requiere únicamente de actualización software, GPRS
necesita de un hardware específico para el enrutamiento a través de una red de
datos.
EDGE (Enhaced Data rates for GSM Evolution) nos acerca a
las capacidades que otorga 3G en la comunicación. En combinación con GPRS puede
alcanzar velocidades de 384 kbit/s
En la transición se necesitarán por
tanto terminales capaces de acceder a ambas redes.
Hasta el momento las
empresas de desarrollo y creadoras de contenidos están volcadas en es desarrollo
de aplicaciones WAP ya que se prevee su expansión en un corto periodo de tiempo.
Además que la aparición inminente del GPRS ayudará a relanzar mucho más el
acceso a aplicaciones móviles a través de Internet.
WAP acerca a los
usuarios a la utilización de servicios de internet, el posicionemiento en esta
tecnología ayudará al éxito en el desarrollo de proyectos UMTS. Por lo tanto no
hay que ver únicamente a WAP como una tecnología pasarela a UMTS sino que además
es una introducción de todas las partes (usuarios, operadoras, empresas, etc..)
a servicios móviles en redes.
Nuevos negocios se podrán implementar para
esta tecnología, que van desde los propios fabricantes de dispositivos hardware,
que desarrollarán los nuevos teléfonos y dispositivos capaces de aprovechar el
nuevo método de comunicación a los propios desarrolladores que se les abrirán
nuevas posibilidades que hasta ahora son inpensables de creación de contenidos,
aplicaciones, etc...
Mediante un conjunto de "Chips" se puede convertir un móvil en un control
remoto universal para aparatos electrodomésticos. Proximamente se comercializarán móviles con esta
capacidad.![]()
8.5 Sistema de
Posicionamiento Global (GPS)
8.5.1
Introducción histórica
Cuando la Unión Soviética puso en órbita
el primer satélite artificial de la Tierra, se observaba como un puntito
brillante, que se movía lentamente entre los astros que servían de punto de
referencia para los navegantes. Pronto surgió una idea, pasar de la navegación
estelar a la por satélite. Un grupo de científicos soviéticos, dirigidos por el
académico V. Kotélnikov, ofrecieron utilizar el método Doppler para determinar
los parámetros de las órbitas de los satélites.  El 3 de Marzo de 1978, la URSS puso en marcha el satélite Cosmos
1000, dando inicio al sistema de navegación cósmica nacional, "Tsikada",
destinado a localizar a los barcos en cualquier lugar del océano. Actualmente
hay varios satélites con esta misión.
El 3 de Marzo de 1978, la URSS puso en marcha el satélite Cosmos
1000, dando inicio al sistema de navegación cósmica nacional, "Tsikada",
destinado a localizar a los barcos en cualquier lugar del océano. Actualmente
hay varios satélites con esta misión.
Con este esquema de satélites, se
pueden obtener datos, en el ecuador cada 72 minutos y en latitudes altas más a
menudo, y en las latitudes norteñas, donde las órbitas se cruzan,
ininterrumpidamente. En los barcos se instala un microprocesador, que se conecta
al sistema de radionavegación tradicional
El uso de este sistema,
proporcionaba, hace unos años, el ahorro del orden de unos 25000 rublos al año,
por barco, en la URSS (Actualmente desaparecida).
Posteriormente se
implantó en la URSS el Sistema de Satélite de Navegación Global (SSNG), para la
localización exacta de barcos, automóviles y otros objetivos.
En el año
1986, la URSS y los EE.UU., declararon a la Organización Marítima Internacional,
que se podían explotar estos sistemas con fines pacíficos. Este sistema se ha
desarrollado desde entonces, quedando completo el año 1995. Consta de 24
satélites, de los que tres son de reserva, situados en tres planos orbitales, a
20200 km de altura, con un ángulo de 120 grados; uno respecto al otro. Las
señales de navegación se emiten en una banda de 1602.2 a 1615 MHz. Además estos
satélites pueden servir a una cantidad ilimitada de usuarios. Actualmente este
sistema está gestionado por el Ministerio de Defensa de EE.UU.
Este es
el origen del Sistema de Posicionamiento Global "GPS", en amplio desarrollo
actualmente, cuyo predecesor, el SSNG, puede seguir usándose, mediante un módulo
adicional.
A muchos navegantes y topógrafos acostumbrados a trabajar con
los métodos tradicionales, el posicionamiento de posición con sólo pulsar un
botón, les debe de parecer sorprendente. Pues bien, existe actualmente una forma
más avanzada del GPS, que optimiza aún más los límites de la precisión.
Este avance se conoce como GPS diferencial "DGPS", y con él se puede
medir fiablemente una posición hasta cuestión de metros, y en cualquier lugar
del planeta.
8.5.2 GPS Básico
Este
sistema se basa en 24 satélites orbitando a más de 20000 km de altura. Estos
actúan como puntos de referencia a partir de los cuales "triangulan" su posición
unos receptores en la Tierra. En cierto sentido es como una versión en alta
tecnología de la vieja técnica de los "boy scouts" o bandas análogas,
consistente en tomar marcaciones mediante una brújula desde las cumbres de los
montes cercanos para situar un punto en el mapa. 
Los satélites actúan como puntos de referencia al ser
supervisadas sus órbitas con gran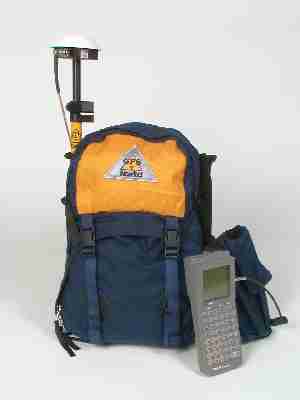 precisión desde estaciones terrestres. Mediante una
medición del tiempo de viaje de las señales trasmitidas desde los satélites, un
receptor GPS en tierra determina su distancia desde cada satélite. Con la
medición de la distancia desde cuatro satélites y la aplicación de cálculo
matemático, el receptor calcula, latitud, longitud, altitud, derrota y
velocidad. Los buenos receptores tienen una precisión menor que 100 m, y
efectúan más de una medida por segundo.
precisión desde estaciones terrestres. Mediante una
medición del tiempo de viaje de las señales trasmitidas desde los satélites, un
receptor GPS en tierra determina su distancia desde cada satélite. Con la
medición de la distancia desde cuatro satélites y la aplicación de cálculo
matemático, el receptor calcula, latitud, longitud, altitud, derrota y
velocidad. Los buenos receptores tienen una precisión menor que 100 m, y
efectúan más de una medida por segundo. 
Los receptores pueden hacerse con
antenas muy pequeñas, de hecho son de tal tamaño, que caben en la mano.
Otra ventaja es que las señales GPS (código C/A) están al alcance de
todos, gratuitamente sin necesidad de pagar tasas de licencia ni uso, aunque el
gobierno actual le gustaría cobrar por ello, no es posible pues los satélites
son de EE.UU y de Rusia, con lo cual no tiene ninguna opción de sacar dinero a
costa de este tipo de usuarios. El código denominado P(Y) es de uso militar y
restringido a usuarios autorizados.
8.5.3 GPS en tres pasos básicos
Paso 1
Los satélites son
puntos de referencia. Sus posiciones en el espacio se conocen con toda
precisión, constituyendo la base de todos los cálculos GPS.
Paso 2
El tiempo de viaje de la señal da la
distancia. Mediante una serie de mensajes codificados, un receptor en tierra
determina el momento en que la marca de tiempo partió del satélite, así como el
momento de llegada a su antena. La diferencia es el tiempo de viaje de cada
señal. La distancia es el producto del tiempo por la velocidad de la luz. En
este proceso es donde hay errores.
Paso
3
Tres distancias fijan la posición. Se supone un receptor a
23000 km de un satélite. Esta medición restringe el lugar del universo en que
puede encontrarse el receptor. Indica que ha de estar en algún lugar de una
superficie esférica imaginaria, centrada en ese satélite y con un radio de 23000
km.
Si por ejemplo el receptor se encuentra a 26000 km de un segundo
satélite, eso restringe aún más el lugar, a la intersección entre dos esferas,
que es una circunferencia.
Una tercera medición, añade otra esfera, que
intercepta el círculo determinado por las otras dos. La intersección ocurre en
dos puntos, y así con tres mediciones, el receptor restringe su posición a sólo
dos puntos en todo el universo.
Una cuarta medición seleccionaría uno de
estos dos puntos, pero no es necesario, pues de los dos puntos del paso
anterior, uno está a miles de km de la Tierra, por lo que no tiene sentido.
Aunque a veces es realizada esta cuarta medición, para proporcionar una
forma de asegurar que el reloj del receptor está sincronizado con la hora
universal.
8.5.4 GPS diferencial
Es
una forma de hacer más preciso al GPS. El DGPS proporciona mediciones precisas
hasta un par de metros en aplicaciones móviles, e incluso mejores en sistemas
estacionarios. Esto implica el que sea un sistema universal de medición, capaz
de posicionar cosas en una escala muy precisa.
El DGPS opera mediante la
cancelación de la mayoría de los errores naturales y causados por el hombre, que
se infiltran en las mediciones normales con el GPS.
Las imprecisiones
provienen de diversas fuentes, como los relojes de los satélites, órbitas
imperfectas y, especialmente, del viaje de la señal a través de la atmósfera
terrestre. Dado que son variables es difícil predecir cuales actúan en cada
momento. Lo que se necesita es una forma de corregir los errores reales conforme
se producen.
Aquí es donde entra el segundo receptor, se sitúa en un lugar
cuya posición se conozca exactamente. Calcula su posición a través de los datos
de los satélites y luego compara la respuesta con su posición conocida. La
diferencia es el error de la señal GPS.
No es posible calcular el error
en un momento y que valga para mediciones sucesivas, ya que los receptores de
los satélites cambian continuamente. Para realizar esta tarea es necesario tener
dos receptores operando simultáneamente. El de referencia permanece en su
estación y supervisa continuamente los errores a fin de que el segundo receptor
(el itinerante) pueda aplicar las correcciones a sus mediciones, bien sea en
tiempo real o en algún momento futuro.
El concepto ya está funcionando
algún tiempo y se ha utilizado ampliamente en la ciencia e industria. Hay una
norma internacional para la transmisión y recepción de correcciones, denominada
"Protocolo RTCM SC-104".
8.5.5 ¿ Por qué se necesita
el DGPS ?
Si el mundo fuera como un laboratorio, el GPS sería
mucho más preciso. Dado que el mundo parece una jungla, hay multitud de
oportunidades para que resulte perturbado un sistema basado en la radio. A
continuación se describen los errores a los que hay que enfrentarse:
Errores de los satélites
Los
satélites levan relojes atómicos muy precisos, pero no perfectos. La posición de
los satélites en el espacio es también importante, estos se ubican en órbitas
altas, por lo que están relativamente libres de los efectos perturbadores de la
capa superior de la atmósfera terrestre, pero aún así se desvían ligeramente de
las órbitas predichas.
La atmósfera
La información se transmite por señales de radio y esto constituye otra
fuente de error. La física puede llevarnos a creer que las señales de radio
viajan a la velocidad de la luz, que es constante, pero eso sólo es en el vacío.
Las ondas de radio disminuyen su velocidad en función del medio en que se
propagan. Así pues, conforme una señal GPS pasa a través de las partículas
cargadas de la ionosfera y luego a través del vapor de agua de la troposfera, se
retrasa un poco, lo cual implica un valor erróneo de la distancia del satélite.
Error multisenda
Cuando la
señal GPS llega a la Tierra se puede reflejar en obstrucciones locales antes de
llegar al receptor. La señal llega la antena por múltiples sendas, primero la
antena recibe la señal directa y algo más tarde llegan las desplazadas,
produciendo ruido. Un ejemplo es en el caso de la TV cuando se ven imágenes
múltiples solapadas.
Error del
receptor
Los receptores tampoco son perfectos y pueden
introducir sus propios errores, que surgen de sus relojes o de ruido interno.
Disponibilidad selectiva
Mucho
peor que las fuentes naturales de error es el que aporta intencionadamente el
Departamento de Defensa de EE.UU.. Su finalidad es asegurarse de que ninguna
fuerza hostil utiliza la posición de GPS contra los EE.UU.
Se introduce
ruido en los relojes de los satélites, lo cual reduce su precisión, aunque
también pueden dar datos orbitales erróneos.
Los receptores militares
disponen de una llave física que desencripta los errores introducidos para así
eliminarlos. De esta forma se pueden llegar a precisiones de 15 m.
El
DGPS obtiene mejores precisiones que las conseguidas con las codificadas para
usos militares.
DGPS también proporciona una forma de verificar la
fiabilidad de las mediciones momento a momento.
|
|
|
|
| Relojes de satélites |
1.5 |
0 |
| Errores de órbitas |
2.5 |
|
| Ionosfera |
5 |
0.4 |
| Troposfera |
0.5 |
0.2 |
| Ruido receptor |
0 |
.3 |
| Multisenda |
0 |
.6 |
| Dep. Defensa |
30 |
0 |
|
|
|
|
| Horizontal |
50 |
1.3 |
| Vertical |
78 |
2 |
| 3D |
93 |
2.8 |
8.5.6 ¿ Cómo funciona el DGPS ?
El GPS es "autónomo", esto es, que un solo receptor puede desplazarse a
cualquier sitio y realizar mediciones por sí mismo, empleando como referencia
los satélites GPS. Mientras que el DGPS implica otro receptor añadido, uno que
se desplaza y otro estacionario.
Previamente se han comentado las
diversas fuentes de error. A su vez las distancias entre los dos receptores son
muy pequeñas comparadas con las distancias a las que se encuentran los
satélites, esto quiere decir que recorrerán la atmósfera con retrasos análogos,
de forma que una de las estaciones puede dedicarse a medir esos errores y
facilitárselo a la otra.
Se ha de ubicar el receptor de referencia en un
punto cuya posición se haya determinado con exactitud, al recibir las señales
GPS ataca los cálculos en sentido inverso al de un receptor. Emplea su posición
para calcular el tiempo. Y así obtiene el error entre el teórico y el real.
Todos los receptores de referencia han de facilitar esta información de
errores a todos los receptores itinerantes de su zona con objeto de que corrijan
sus mediciones. El receptor de referencia reconoce todos los satélites visibles
y calcula los errores instantáneos.
Luego codifica esta información en
un formato estándar y lo transmite a los receptores itinerantes.
Algunos
trabajos no requieren correcciones en tiempo real, en este caso se conoce como
GPS posprocesado.
También existe el DGPS invertido, por ejemplo, en una
flota de camiones que informan periódicamente de su posición a una estación
base. En lugar de enviar a los camiones las correcciones diferenciales, la
corrección se realiza en la estación base. Los camiones sólo conocen su posición
de una manera aproximada, pero el controlador sabría la posición exacta, hasta
el punto de poder ubicar el camión en el carril de la calle en que se encuentra.
8.5.7 Aplicaciones de DGPS
Servicio de guardacostas
El
Servicio de Guardacostas de EE.UU. es el responsable de proporcionar todas las
ayudas de navegación. El huracán BOB que azotó la costa este de EE.UU. en 1991
destrozó o desplazó un gran número de boyas. La situación era peligrosa, pues
los barcos iban a puerto confiados en unas boyas que ya no existían o estaban
cambiadas de sitio.
El Servicio de Guardacostas equipó uno de sus barcos
de mantenimiento de boyas con un receptor DGPS y reposicionaron las boyas de
nuevo, en tan solo unos días.
A lo largo de este año se espera esté
implantado el sistema DGPS para toda la costa de EE.UU.
Aviación
Algunos experimentos realizados por la
NASA y por las FAA de EE.UU. contribuyeron al aterrizaje de helicópteros y
aviones de pasajeros mediante DGPS como único sistema guía, sin las radiobalizas
tradicionales.
En la actualidad los sistemas de aterrizaje con poca
visibilidad son tan caros que sólo están disponibles en los mayores aeropuertos.
El DGPS es tan barato que lo puede instalar cualquier aeropuerto. La mejora de
seguridad de vuelo es tremenda.
Como referencia se puede citar Canadá,
donde el sistema GPS ha sustituido al habitual, comnocido como Omega.
Gestión de los recursos naturales
La gestión del uso y protección de los bosques es una gran tarea. Su
estudio topográfico es difícil, sin embargo hay que medir constantemente
parcelas de árboles, ya sea por asunto de su conservación o por ventas a
empresas madereras.
El Servicio Forestal de EE.UU. ha sido uno de los
pioneros del DGPS. Hacen medidas con GPS desde helicópteros.
Otras
aplicaciones son: topografía de galerías de minas, de superficies de pantanos y
de zonas para pesca.
Otro caso es el control de incendios en los
bosques.
Exploración costera
Las empresas petrolíferas gastan enormes cantidades de dinero en la
exploración del fondo de los océanos en busca de lugares idóneos para perforar.
El problema, es que una vez el barco encuentra un lugar de perforación, su
tripulación necesita llevar a ese punto los dispositivos de perforación, lo cual
no es fácil llegar al mismo sitio, al no haber posibilidad de poner marcas de
referencia, y apartarse unos metros significa muchos millones de gasto de más.
Para solucionar este problema usan el GPS.
Otra utilidad es para
mantener a los barcos en las rutas exactas.
También se usan para el
levantamiento topográfico de los puertos.
Gestión
transporte y flotas
Con este sistema el controlador de una
flota puede llevar la cuenta de cada vehículo, el resultado es una más
estricta adhesión al horario y una mejor supervisión.
A las empresas de
transporte, flotas de servicios y servicios de seguridad pública les gusta saber
la posición de sus vehículos incluso al extremo de conocer el nombre de la
calle. La solución es DGPS.
También se usa en los ferrocarriles
El GPS está abriendo una nueva era de "agricultura de
precisión". Un agricultor puede analizar las condiciones del suelo en cada
parcela, y compilar un mapa de las demandas de fertilizante. Este mapa se
digitaliza y se registra en ordenador. La máquina que adiciona los productos
químicos al terreno, va con un GPS y su posición se correlaciona con los datos
previamente digitalizados, añadiendo en cada punto la cantidad exacta de
fertilizante. Se beneficia el agricultor con menos gasto y el medio ambiente
evitando un exceso de productos químicos.
También se puede aplicar a la
fumigación aérea.
Transporte marítimo
En EE.UU. es obligatorio que los barcos petroleros lleven GPS por
motivos de seguridad.
Otras aplicaciones costeras son: la verificación
de vaciados en barcazas, hasta la determinación de las zonas de pesca legal.
Seguridad pública
Para los
servicios de bomberos y policía el tiempo de respuesta es muy importante. Con
DGPS se pueden guiar los vehículos con gran precisión. Los planos de rutas
centralizadas ofrecen a los controladores un mejor conocimiento de la forma en
que están desplegados sus efectivos.
8.5.8 ¿Cómo
solucionar la limitación de los 100 m de resolución?
Como se ha
comentado previamente, el sistema GPS para usos no militares tiene una
limitación puesta intencionadamente por el ministerio de defensa de EE.UU., con
la finalidad, como ya en normal en ellos de incordiar y no beneficiar a nadie,
la limitación a 100 m en la resolución, salvo que se use el DGPS que como se ha
visto requiere más medio y por lo tanto es más costoso. Debido a las presiones
de diversos sectores, el presidente de EE.UU. ha indicado que en el plazo de 10
años se eliminarán las restricciones militares, pero mientras tanto el error en
demasiado grande para algunas aplicaciones, como el control de flotas de
autobuses urbanos. Para resolver esta falta de resolución, en EE.UU se ha
propuesto un sistema aplicable a los autobuses que consta del siguiente
equipamiento en cada autobús, un odómetro o sensor de velocidad del vehículo, y
un giróscopo que nos dará el cambio en acimut del vehículo. Estos sensores ha de
estar perfectamente calibrados y además ha de conocerse ña posición inicial y el
acimut. Como todos los sensores están sujetos a error esta no es la solución
perfecta. La empresa Andrew Corp., ha creado un sistema que combina lo mejor del
GPS y el sistema de posicionamiento continuo (CPS). El sensor de GPS calibra los
sensores para evitar errores acumulados. El factor más importante en la
generación de errores es la estabilidad del giróscopo, reducidos al mínimo con
el sistema Navigator AUTOGIRO, basado en un giróscopo con fibra óptica, diseñado
especialmente para sistemas de navegación. El sistema propuesto por esta empresa
está aplicándose en diversas empresas de transporte urbano de EE.UU.
El
siguiente enlace es una página
dedicada a GPS.![]()
8.6
Seguridad en Redes y Comunicaciones
8.6.1. Introducción
En la
actualidad las comunicaciones y la información, incluyendo voz, imágenes,
textos, números, se crean, almacenan, transfiereen y se accede a ellas mediante
tecnología digital, tal como se ha visto previamente. Desgraciadamente, los
"hackers" (actualmente se estima la existencia de unso 35000 en EE.UU, y se
prevee que aumente esta cifra hasta los 56000 en el año 2000) suelen acceder a
los recursos de las redes y obtener información confidencial. Grandes empresas
están sufriendo pérdidas considerables como resultado del acceso a las redes por
parte de personas no autorizadas.
Los "hackers" pertenecen a
organizaciones bien estructuradas. Estas organizaciones intercambian información
al menos mensualmente y celebran reuniones anualmente. La misma tecnología que
ha revolucionado muchas empresas, también ha revolucionado el crimen
electrónico, usando puntos de entrada no autorizados a la red Internet,
accediendo a comunicaciones a larga distancia. Existen unos 1300 servidores de
información (BBS) ocultos, que tienen información sobre números de tarjetas de
crédito, números de modem e información de teléfonos celulares.
La
seguridad en redes de comunicaciones es una protección contra las pérdidas
debidas al vandalismo y al robo, cuyo origen puede deberse a causas variadas,
como por ejemplo revanchas, retos intelectuales, o planes preconcebidos con
alguna finalidad. Independientemente del motivo, siempre hay un daño a la
víctima.
El robo incluye la copia de documentos confidenciales (tales
como el estado financiero de una empresa) y el uso sin autorización de recursos
como por ejemplo sistemas telefónicos o redes de datos. El vandalismo comprende
la destrucción o corrupción de archivos de datos, introducción de virus
informáticos y reconfiguración de las redes para hacerlas inaccesibles a los
usuarios autorizados.
Las empresas de EE.UU pierden a causa de la
delincuencia informática 550 Millones de dólares al año, una de cada cuatro
empresas ha sido víctima.
Seguidamente se citan algunos casos:
Accedieron a la empresa Boeing Aircraft, tomando todas las
claves de los equipos UNIX.
Las empresas de informática tampoco se ven
libres de esta delincuencia, por ejemplo la empresa SUN, muy conocida por sus
estaciones de trabajo, hace cuatro años se vio forzada a suspender toda su
actividad informática durante 72 horas al descubrirse el acceso de un "hacker" a
su red de 20000 estaciones UNIX, la causa fue que muchos empleados habían puesto
modem en su puesto de trabajo, sin el consentimiento propio de la empresa. SUN
tuvo que cambiar las claves de acceso de sus 20000 equipos.
Usualmente
las grandes empresas y organismos oficiales protegen los puntos de acceso a sus
instalaciones, vigilantes de empresas de seguridad son habituales en las
entradas, normalmente cualquier persona que acceda ha de estar completamente
identificada y en algunos casos sólo puede desplazarse a algunas partes del
edificio. De forma análoga en las redes de comunicaciones hay sistemas de
seguridad respecto a los accesos y diversas posibilidadades para llegar hasta
distintas informaciones en función del tipo de usuario que se sea.
Hay
tres formas principales de atacar la seguridad de un ordenador:
A) Ataques pasivos
La
obtención fraudulenta de los datos puede tener lugar en cualquier punto del
enlace de comunicaciones o de la red.
Cualquiera que sea el medio
utilizado para transmitir los datos, se podrá averiguar con distintos grados de
dificultad. Las líneas telefónicas pueden disponer de conexiones eléctricas
directas realizadas en cualquier punto poco vigilado. Los procedimientos de
escucha no invasivos, como los que utilizan acoplamiento inductivo, sólo son
adecuados para ataques pasivos. Los equipos de control se pueden conectar a las
líneas telefónicas dentro de los edificios que contienen el ordenador o
cualquier o en cualquier punto a lo largo del enlace. Los datos pueden grabarse
localmente o transmitirse a un receptor/grabador cercano, fuera del edificio. Si
se emplea un transmisor se alimentará de la tensión contínua de la red
telefónica pública, aunque esto puede originar una baja impedancia en la línea,
y por lo tanto ser detectado. Si se conecta un sistema de elevada impedancia, es
imposible de detectar.
Los enlaces por microondas y satélite se pueden
interceptar mediante receptores de radio de alta sensibilidad. Los lóbulos
laterales de las antenas de microondas permiten monitorizar las señales en las
proximidades de las torres repetidoras, sin estar en la ruta directa del haz
principal. Los enlaces por satélite son accesibles en una zona bastante amplia
alrededor de la estación receptora de tierra. También son posibles los ataques
activos a enlaces de datos via satéite y microondas, pero son fáciles de
detectar.
El cable coaxial de alta calidad y correctamente instalado
emite una cantidad despreciable de energía electromagnética, pero si el cable se
dobla más de lo que permite su radio de curvatura máximo, se incrementan las
fugas. UN equipo de radio sería capaz de intervenir de forma no invasiva en el
enlace.
Cualquier equipo electrónico para transmisión de datos puede
radiar emisión electromagnética a partir de la cual se pueden obtener los datos.
Un receptor sensible localizado cerca del equipo o conectado a sus líneas de
alimentación o a otros conductores cercanos se puede utilizar para filtrar y
grabar las emisiones. Los teléfonos sirven de receptores excelentes para la
radiación de campo cercano procedente de un ordenador. El bucle de abonado se
puede evitar colocando un díodo zener entre los contactos y las señales
recogidas se pueden monitorizar interviniendo la línea telefónica fuera de la
zona de seguridad.
B) Ataques activos
Estos ataques se pueden dividir en tres categorías:
1.
Modificación de mensajes
2. Negación de servicio de mensajes
3.
Iniciación de asociación espúrea
8.6.2 Claves De Acceso
Para
garantizar la seguridad se utilizan las palabras claves de acceso "password" o
PIN muy conocidos por ejemplo para el acceso a terminales bancarias.
Desdichadamente este sistema no proporciona una seguridad absoluta, pues son
fáciles de robar, copiar y usar fraudulentamente.
Las palabras claves
("password") han de ser secretas para el resto de los usuarios, por lo que la
persona que la tiene es lógico que siga los consejos indicados seguidamente:
En el año 1993 un 20 % de los accesos fraudulentos se debían
al uso de diccionarios para buscar la palabra clave. Un 86% de códigos de
acceso estaban dentro de uno de estos conjuntos, palabras en un diccionario,
palabras de un diccionario pero al revés, nombres comunes, números de
matrículas del coche y otros números como el del DNI.
8.6.3 Encripción
En la
primera guerra mundial surgió la necesidad de proteger los mensajes que se
enviaban entre teletipos. Gilvert S. Vernam desarrolló en 1917 un sistema de
cifrado adecuado utilizando una clave secreta que se combinaba con los
caracteres del texto original, utilizando una función exclusiva, para formar
los caracteres cifrados que se transmitían. En el receptor se recuperaba el
texto original mediante un proceso análogo.
La encripción o cifrado es
un proceso que transforma texto legible por cualquiera. en una forma
incomprensible conocida como texto cifrado, mediante el uso de algoritmos
matemáticos. Sólo los usuarios con una clave digital. un programa codificador
y decodificador basado en el algoritmo correspondiente, pueden leer el
mensaje.
Existen dos métodos básicos de cifrado:
Este procedimiento usa una clave única para encriptar y
desencriptar los datos. La clave debe ser poseída tanto por el emisor de los
datos como por el receptor. Este sistema es válido para enviar información
desde un punto a un conjunto, o para transferirla entre dos puntos, siempre
ques ea en poca cantidad.
Hay un estándar para este sistema, conocido
como DES (Data Encryption Standar). DES es un esquema adoptado y mantenido por
el Instituto para las Ciencias de la Computación y Tecnología, en el National
Bureau of Standars (EE.UU.). DES especifica un algoritmo para encriptar y
desencriptar información digital, basado en una clave binaria. La clave consta
de 64 bit, 56 se usan en la operación correspondiente y los 8 restantes se
emplean para corrección de errores. La clave se genera de forma que los 56 bit
son aleatorios. Al ser cada clave única, los resultados después de aplicar el
algoritmo son únicos. Con este sistema hay 72*1015 combinaciones
posibles.
Este sistema es habitual en la comunidad financiera y en
industrias que necesitan elevados niveles de seguridad.
B) Clave de encripción pública. (o asimétrico)
Este sistema usa pares de claves, una privada y otra pública. La
privada se emplea en el ámbito personal y no se distribuye, mientras que la
otra, la pública, se difunde al ser necesaria para decodificar los mensajes.
Cada clave pública sólo decodifica los mensajes emitidos por el propietario de
la clave correspondiente privada.
Hay un esquema ampliamente
difundido, RSA, que se distribuye gratuitamente para fines no comerciales,
aunque hay que pagar si se usa con fines comerciales, a la empresa que lo ha
creado ( RSA Security Inc.).
Se
emplea frecuentemente en sistemas de correo electrónico, para proteger los
mensajes privados a través de redes de comunicación.
Una nueva
solución de encripción es el "chip" Clipper,
desarrollado por la "National Security Agency", para proteger la información
digital a través de las redes telefónicas públicas. Sin embargo este sistema
ha suscitado muchas controversias desde
su creación;
es como si todos los ciudadanos tuviéramos que depositar una llave de la
puerta de nustra vivienda, y que en cualquier momento pudiera hacer uso de
ella la policía, queda claro que esto es inaceptable, y va contra los derechos
fundamentales de cualquier persona.
Además otro problema es que el
punto de acceso para permitir su control a algunas agencias gubernamentales,
como el FBI, puede dar lugar al acceso de "hackers"
C) AES
(AES
- Advanced Encryption Standard, Estándar de Cifrado Avanzado)
AES es
el Estándar de cifrado Avanzado, el algoritmo de cifrado que debe reemplazar a
DES. En 1997 el gobierno de los Estados Unidos (NIST realmente), solicitó
algoritmos candidatos para convertirse en este estándar. En Junio de 1998 (la
fecha límite de envío), NIST había recibido quince propuestas. NIST solicitó
comentarios acerca de estos algoritmos, con el objetivo de reducir la lista a
cinco finalistas. NIST convocó una conferencia en Roma en Abril (esta era la
segunda conferencia AES, la primera tuvo lugar en Agosto anterior en
California), la fecha límite para los comentarios era Junio y recientemente el
NIST dio a conocer los finalistas.
Son los siguientes:
Mars,
presentado por un amplio equipo de IBM.
RC6, de RSA Data
Security(incluyendo a Ron Rivest)
Rijndael, de un equipo de excelentes
ciptógrafos belgas.
Serpent, de tres criptógrafos muy respetados; Ross
Anderson, Eli Biham y Lars Knudsen
TwoFish, de Counterpane
Systems
NIST no solo anunció los cinco finalistas. Publicaron un
informe de 52 páginas en el que explican sus razonamientos -- por qué
seleccionaron los algoritmos elegidos y por qué no seleccionaron los no
elegidos -- y vale la pena leerlo para asomarse a su proceso de
decisión.
El siguiente paso es elegir entre los finalistas. NIST
solicita de nuevo comentarios sobre estos algoritmos, y ha habido una tercera
Conferencia de Candidatos AES en New York en Abril del 2000, convocada
conjuntamente con el 7º encuentro de trabajo de Software Rápido de cifrado. El
AES entonces pasará al proceso de aprobación de estándares del gobierno y se
convertirá en un Estándar Federal de Procesamiento de Información (FIPS,
Federal Information Processing Standard), y presumiblemente se convertirá en
el algoritmo estándar de cifrado para todo tipo de aplicaciones
internacionales. Se espera que todo esto suceda para el verano del 2001; el
gobierno se mueve lentamente.
Los criptógrafos están muy ocupados
analizando la seguridad. Podemos pensar en el proceso como si se tratara de un
gran derby de demolición: todo el mundo envía sus algoritmos y entonces se
dedica a atacar los de los otros... el último que resista gana. Realmente, no
será tal y como lo hemos descrito.
Cuando finalice el periodo de
análisis, no es de esperar que se encuentren debilidades importantes en
ninguno de los finalistas. La elección del ganador se basará en otros
factores: rendimiento, flexibilidad, idoneidad.
AES tendrá que
trabajar en una variedad de aplicaciones presentes y futuras, realizando todo
tipo de diferentes tareas de cifrado: microprocesadores de 32 bits,
microprocesadores de 64 bits, pequeñas tarjetas inteligentes de 8 bits, DSPs,
FPGAs, ASICs a medida y cualquier otra cosa que aún no podamos
imaginar.
Seleccionar un solo algoritmo para todas estas aplicaciones
no es fácil. Podría tener más sentido tener una familia de algoritmos, cada
uno optimizado para una aplicación particular, pero habrá sólo un AES. Y
cuando AES se convierta en un estándar, los clientes querrán que sus productos
de cifrado cumplan "el estándar de moda". Los solicitarán en el hardware, en
los ordenadores de sobremesa, en las tarjetas inteligentes, en terminales de
comercio electrónico y en otros sitios en los que jamás se hubiera pensado que
podrían ser usados. Cualquier cosa que elijamos para AES deberá trabajar en
todas estas aplicaciones.
¿Cómo enviar comentarios? NIST está aceptando
comentarios formales tanto en papel como a través de correo electrónico. Se
peude acudir en busca de instrucciones a la página
http://www.nist.gov/aes.
FSE 2000: http://www.counterpane.com/fse.html
8.6.4 Canales de comunicación y ruido
ZEl ruido que introduce un canal puede ser de diferentes tipos:
a) Interferencias entre símbolos, producidas por diferencias entre
modulador y demodulador.
El ruido introducido en un canal se traduce en errores sobre
la información que circula por él. Modelar matemáticamente la distribución de
estos errores es un problema difícil que admite diferentes soluciones, según
el tipo de canal que tengamos. Estos modelos son útiles, sobre todo, cuando
hacemos simulaciones para estudiar la efectividad de un sistema de
codificación propuesto. Algunos modelos normalmente utilizados
son:
 Menú General
Menú General  Capítulo
anterior
Capítulo
anterior  Capítulo
siguiente
Capítulo
siguiente