|
|
Universidad Yacambú
Post Grados Virtuales
Especialización en Gerencia
Mención Redes y Telecomunicaciones
Materia: Equipos de Posicionamiento por Satélite

|
Integrantes: Melva Valdez |
|
Principio de la medida La distancia entre el usuario
(receptor GPS) y un satélite se mide multiplicando el tiempo de vuelo de
la señal emitida desde el satélite por su velocidad de propagación.,Para
medir el tiempo de vuelo de la señal de radio es necesario que los,
relojes de los satélites y de los receptores estén sincronizados, pues
deben generar simultáneamente el mismo código. Ahora bien, mientras los
relojes de los satélites son muy precisos los de los receptores son
osciladores de cuarzo de bajo coste y por tanto imprecisos. Las distancias
con errores debidos al sincronismo se denominan pseudo distancias. La
desviación en los relojes de los receptores añade una incógnita más
que hace necesario un mínimo de cuatro satélites para estimar
correctamente las posiciones .En el cálculo de las pseudo distancias hay
que tener en cuenta que las señales GPS son muy débiles y se hallan
inmersas en el ruido de fondo inherente al planeta en la banda de radio. Este ruido natural está formado
por una serie de pulsos aleatorios, lo que motiva la generación de un código
pseudo aleatorio artificial por los receptores GPS como patrón de
fluctuaciones. En cada instante un satélite transmite una señal con el
mismo patrón que la serie pseudoaleatoria generada por el receptor. En
base a esta sincronización, el receptor calcula la distancia realizando
un desplazamiento temporal de su código pseudo aleatorio hasta lograr la
coincidencia con el código recibido; este desplazamiento corresponde al
tiempo de vuelo de la señal, Este proceso se realiza de forma automática,
continua e instantánea en cada receptor. La utilización de estos códigos
pseudo aleatorios permite el
control de acceso al sistema de satélites, de forma que en situaciones
conflictivas se podría cambiar el código, obligando a todos los satélites
a utilizar una banda de frecuencia única sin interferencias pues cada satélite
posee un código GPS propio. Aunque la velocidad de los satélites es
elevada (4 km/s), la posición instantánea de los mismos puede estimarse
con un error inferior a varios metros en base a una predicción sobre las
posiciones anteriores en un
período de 24 a 48 horas. Las estaciones terrestres revisan periódicamente
los relojes atómicos de los satélites, dos de cesio y dos de rubidio,
enviando las efemérides y
las correcciones de los relojes, ya que la precisión de los relojes y la
estabilidad de la trayectoria de los satélites son claves en el
funcionamiento del sistema GPS.
El sistema NAVSTAR-GPS se basa en la medida
simultánea de la distancia entre el receptor y al menos 4 satélites.
A través de la aplicación de la técnica
de la medida de los retardos temporales:
Los
satélites emiten dos portadoras a la misma frecuencia. Estas portadoras
están moduladas en fase (BPSK) por diferentes códigos pseudo aleatorios.
Los equipos de navegación
(receptores, antenas, etc.,)reciben y decodifican las señales de
radiofrecuencia enviadas desde satélites, Esta información es usada para
calcular la posición, la velocidad y obtener información precisa de
tiempo. En el receptor es medido el tiempo que demora la señal desde el
satélite; multiplicando ese tiempo por la velocidad de la luz se puede
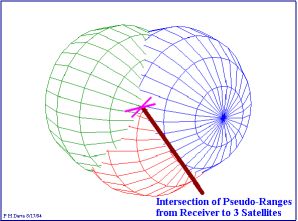
determinar la distancia exacta a cada satélite. Calculando la distancia a tres satélites
es posible determinar su posición; la velocidad se calcula midiendo la
razón de cambio de las señales de radiofrecuencias, Para calcular la
posición en tres dimensiones se requiere contar con un mínimo de cuatro
satélites. Cada satélite transmite
continuamente su mensaje de navegación en dos frecuencias: La frecuencia L1 está centrada en
1575.42 MHz y está modulada en un código de precisión (código P) y en
un código de adquisición (código C-A). La frecuencia L2 está centrada en
1227,60 MHz y modulada sólo en el código P. El código P está
reservado para usuarios militares que requieren mayor exactitud y un alto
grado de protección contra interferencias. El código C-A es utilizado
por cualquier navegante y para ayudar a la adquisición del código P.
Proporciona una exactitud más baja en relación al código P y suministra
un reloj para la transmisión de los mensajes de navegación de cada satélite.
Existe también un código aún más exacto, disponible sólo para algunos
usuarios, conocido como Selective Adquisition (S-A) con capacidad anti
spoofing, en que la información transmitida por los satélites es en base
a un sistema criptográfico. Durante su operación, el equipo de
navegación recolecta y almacena en su memoria el almanaque del satélite.
Los datos del almanaque normalmente están disponibles cuando se enciende
el equipo y da la información acerca de la posición de los satélites.
El operador sólo debe introducir una posición cercana y hora estimada
para que el equipo inicie el almacenamiento del almanaque en su memoria.
Con esta información, el equipo de navegación determina cuáles satélites
son convenientes y rebusca los códigos de éstos. Cuando el código C-A
del satélite está identificado, el equipo
automáticamente cambia al código P para obtener el mensaje de navegación
y actualizar su memoria. Obtención de la posición Como ya se indicó,
para obtener la posición el GPS se basa en el principio de calcular las
distancias a los satélites. Esto
se logra midiendo el tiempo que transcurre desde la emisión de la señal
hasta la recepción, el que se multiplica por la velocidad de la luz para
obtener la distancia. El punto donde se cortan las distancias es la posición
del navegante. Obviamente, esta explicación no
considera los errores que deben corregirse, como: a) Desfase horario entre el satélite y
el observador. b) Efectos atmosféricos tales como
retrasos tropos feéricos y paso de la señal por la ionosfera. c) Diferencias entre los elipsoides de
referencia. El mensaje de navegación está
constituido por los siguientes elementos:
Se transmite a un régimen binario
de 50 bps y se tarda 12.5 min. en enviarlo completamente. Su
estructura se muestra a continuación: Subsistema
De Control Mensaje De Navegación:
Este subsistema consiste en una Estación Maestra de Control, localizada
en Colorado Springs, California E.U., y cuatro estaciones más,
distribuidas a lo largo del ecuador alrededor del mundo. Cada estación de
control rastrea los satélites GPS mediante radiotelescopios y envía la
información hacia la estación maestra, donde se llevan a cabo
complicados cálculos para determinar las efemérides precisas de cada satélite
y el error de reloj correspondiente. La estación maestra genera la
actualización de la información de navegación de cada satélite y la
transmite a los satélites, esta información a su vez es retransmitida
por los satélites como parte de su mensaje de navegación al Subsistema
del Usuario. En el mensaje de navegación se encuentra la siguiente
información:
Estaciones
del Subsistema de Control: El mensaje de navegación GLONAS transmite señales a diferentes
frecuencias, hay dos problemas principales los cuales afectan el calculo
de ambigüedades en la fase portadora. Errores: 1. Cada una de las señales del GLONASS
puede ser demorada a través de la antena, los cables o filtros en el
receptor, para el GPS las demoras son identificables porque las señales
son identificables en la misma frecuencia y entonces ellas simplifican los
errores del reloj. 2. El hecho de que las medidas son hechas
a tiempos ligeramente diferentes. GLONASS emplea dos mensajes de navegación
que van sumados a los códigos C/A y P respectivamente. La información
contenida en las efemérides permite al receptor GLONASS conocer
exactamente la posición de cada satélite en cada momento. Además de las
efemérides, en el mensaje de navegación hay otro tipo de información
como el estado de salud del satélite, edad de los datos, cronometraje de
épocas, bits de reserva, al igual que puede incluir información que
permita el uso de los sistemas GPS y GLONASS simultáneamente (WGS–84 y
PZ–90). El mensaje de navegación C/A Cada uno de los satélites de GLONASS
emite un mensaje de navegación en esta categoría, compuesto por una
trama que a su vez esta formada por 5 subtramas. Cada subtrama contiene 15
palabras de 100 bits cada una. El tiempo que tarda cada subtrama en ser
emitida es de 10 a 15 segundos por lo que una trama completa duraría máximo
2.5 minutos. Cada subtrama posee la información del
almanaque de 5 satélites. Este almanaque posee el restante compendio de
palabras que contiene información de efemérides aproximadas al resto de
satélites de la información ya que las tres primeras palabras de cada
subtrama contienen información de las efemérides propias de cada satélite,
llegando al receptor cada 30 segundos. El mensaje de navegación P El sistema de navegación P fue
descifrado por varias organizaciones y entidades individuales ya que no
hay un pronunciamiento oficial. De acuerdo a dichas investigaciones en
este nivel cada satélite emite una trama formada por 72 subtramas. Cada
subtrama contiene 5 palabras de 100 bits. Una subtrama tarda 10 segundos
en ser emitida. Las tres primeras subtramas contienen las efemérides
detalladas del propio satélite, por lo que estas llegaran al receptor
cada 10 segundos una vez establecida la recepción. Sistema de coordenadas El marco de referencia de GLONASS es un
sistema geocéntrico coordenado (SGS- 90 or PZ 90). El GPS y GLONASS trabajan con sistemas de
referenciación distintos, la transformación hacia la vinculación de los
dos sistemas es necesaria para su mayor capacidad. El Sistema de Tiempo Cada satélite del sistema esta equipado
con relojes de cesio que son corregidos dos veces al día, lo que permite
una precisión de 15 nanosegundos en la sincronización de tiempos de los
satélites respecto al Sistema de Tiempos GLONASS (GLONASST) el cual es
generado en la Central de Sincronización de Tiempos de Moscú. La
diferencia del sistema de tiempos con GPS radica en que este ultimo
utiliza el sistema TAI (Tiempo Atómico Internacional) el cual no tiene en
cuenta la disminución de la velocidad de la tierra respecto al sol, como
si lo ase el sistema UTC (CIS) bajo control del Centro Meteorológico
Principal del Servicio Ruso de Tiempos y Frecuencias de Mendeleevo. Lo que implica un desfase en el sistema
de GPS de 1 segundo por año, alterando la sincronización con el día
solar Cuando
observamos el cielo en una noche despejada y oscura, en un sitio alejado
de la iluminación urbana, podemos ver la luz de miles de estrellas.
Podemos apreciar diferencias de brillo y, si miramos con atención, también
distintos colores. A pesar de lo inspirador que puede ser esta visión, no
deja de sorprender el saber que tanta información está guardada en la
luz de los astros. Información de la luminosidad, de la temperatura, de
la composición química e, incluso, del movimiento del astro y sus
componentes. Para descifrar la luz de las estrellas es necesario, además
de contar con herramientas como telescopios y espectrógrafos, entender
fenómenos como el efecto Doppler. Christian
Doppler fue un físico Austríaco del siglo pasado (el XIX) famoso por su
estudio de como cambian las propiedades del sonido cuando el objeto que lo
emite está en movimiento. Doppler encontró las expresiones matemáticas
que describen cómo cuando un objeto se acerca hacia nosotros el sonido
que emite se vuelve mas agudo mientras que al alejarse de nosotros el
sonido es mas grave. Aun cuando el trabajo de Doppler se refirió al
estudio de las ondas de sonido, este mismo fenómeno se produce en otros
tipos de ondas, particularmente en las ondas electromagnéticas, como la
luz: cuando una fuente de luz se acerca hacia nosotros se ve mas azul,
mientras que si se aleja se ve mas roja. Que
tan fuerte es el cambio de frecuencia o de color depende de que tan grande
es la velocidad de la fuente emisora de luz (o sonido) en relación a la
velocidad conque se mueve la luz (o el sonido). En el caso de ondas
sonoras, la velocidad del sonido es de unos 1200 kilómetros por hora, por
lo que el efecto Doppler es perceptible para velocidades de unos 100 kilómetros
por hora. En el caso de las ondas electromanéticas, la velocidad de la
luz es de 300 mil kilómetros por SEGUNDO, por lo que hace falta
velocidades muy altas para poder apreciar este efecto. La
cuenta Doppler se basa en la medición del desplazamiento o corrimiento
Doppler, que consiste en la variación aparente en el valor de la
frecuencia en función de la velocidad de acercamiento o alejamiento de la
fuente emisora. El
receptor de la señal G.P.S. recibe durante un periodo la señal emitida
por un satélite; esta señal se mezcla con la del oscilador local y se
obtiene una señal diferencia. A partir de la variación de esta
diferencia se puede establecer una cuenta denominada cuenta Doppler. La
cuenta Doppler entre dos posiciones concretas del satélite permite
calcular una diferencia de distancias entre ambas posiciones del satélite
y el receptor. Pero se conoce la diferencia de distancia, no la distancia
en sí, lo que posiciona al receptor en un hiperboloide de revolución con
foco en las posiciones del satélite en los dos momentos de observación.
Con cuatro satélites se obtienen cuatro hiperboloides de revolución,
cuya intersección determina la posición del receptor. Este método
necesita de un tiempo de observación largo debido a la 'lentitud' de los
satélites. Un
breve posicionamiento Doppler, con unos cientos de metros de error, es una
buena base de partida para empezar con un posicionamiento por
pseudodistancias, para el que las obtenidas por Doppler son suficientes
como coordenadas aproximadas de arranque para que la solución converja rápidamente. El
Corrimiento Doppler es definido como el ancho espectral de la portadora
recibida cuando una simple portadora sinosoidal es transmitida dentro de
un canal de multiples trayectorias. Es decir, cuando un transmisor o un
receptor está en movimiento , la frecuencia de la portadora recibida
presenta variaciones con respecto a la frecuencia de la portadora que se
transmitió, produciendo de esta manera la pérdida parcial por instantes
de tiempo o completa de la señal que fue transmitida. Si la distancia
entre el transmisor y el receptor aumenta , la frecuencia disminuye,
cuando la frecuencia aumenta la distancia entre el transmisor y el
receptor disminuye . El
efecto de la Propagación de la onda será:
El
máximo Corrimiento Doppler ocurre para una onda que viene desde de una
dirección opuesta a la dirección de la antena en movimiento. Es decir,
el Corrimiento Doppler esta determinado por:
Donde
: El
signo de la expresión indica si el desplazamiento se acerca o aleja del
transmisor fijo. fc:
Es la frecuencia de la portadora . C:
es la velocidad de la luz. V:
es la velocidad del objeto en movimiento. Tales
movimientos en dirección a la antena producen ondas reflejadas
individualmente con desplazamientos de fase ( variaciones de tiempo ).
Esto origina dificultad en la recepción , que se deben de compensar .
Para poder lograr esto, lo ideal sería recibir distintas ondas con
diferentes desplazamientos, de manera tal que los cambios relativos de
fase se produzcan constantemente, afectando la amplitud de la señal
resultante. El Corrimiento Doppler determina las variaciones de amplitudes
de la señal resultante. Al
receptor llegan diferentes ondas con sus propios desplazamientos de fase,
por lo tanto cada una con su propio Corrimiento Doppler, con
distribuciones no uniformes ( 0, 2pi ), independientemente de las otras
ondas de llegada. Esto se puede calcular a través de una función de
Densidad Probabilística de las ondas que llegan , por lo que podremos
obtener la distribución espectral Doppler de la señal recibida. La
función de densidad para el cálculo de la Potencia del espectro para una
dispersión isotópica es : S(t)
=
Gráficamente
la distribución Espectral del Corrimiento Doppler se define por una Parábola:
El
rango (fc - fm, fc + fm ) define el Esparcimiento Doppler. Una manera
clara de ver este efecto es observar un Sistema de Telefonía Celular. La
Telefonía Celular corrige muchos de los problemas de los servicios de
telefonía móvil de dos direcciones tradicionales y crea un ambiente
totalmente nuevo para el servicio telefónico normal de líneas inalámbricas.
Basada
en el concepto de "reuso de frecuencias" incrementa la capacidad
de un canal de telefonía móvil, es decir, el mismo conjunto de
frecuencias ( canales ) se pueden asignar a mas de una célula, siempre y
cuando las células estén a una cierta distancia de separación,
permitiendo así que un gran número de usuarios compartan un número
limitado de canales de uso común, dicho sistema trabaja en un rango de
frecuencia de 800 a 900 MHz. y es uno de los sistemas inalámbricos que se
ve mas afectados por el Corrimiento Doppler . Si la comparamos con la
banda FM que posee las frecuencias comprendidas entre 87 - 107 MHz. nos
daremos cuenta que el Corrimiento Doppler es mayor en las bandas de
frecuencias altas, es decir, a mayor frecuencia y mayor velocidad , se
posee un mayor Corrimiento Doppler. Para
una velocidad fija de 3 Km/h y las bandas respectivas de frecuencias
compararemos el Corrimiento Doppler para sistemas FM y Telefonía Celular:
Gráficamente:
Como
podemos apreciar tanto en la tabla como en la gráfica los sistemas inalámbricos
que trabajan en las frecuencias altas, son las que se ven mas afectados
por el Corrimiento Doppler, sin embargo la tecnología de sistemas inalámbricos
encierra dos grandes grupos o categorías de sistemas, los sistemas con
base terrestre y los de base satelital en estos la transmisión es
unidireccional y mas específico el Radar se beneficia con el Corrimiento
Doppler que afecta a la observación realizada cuando existe movimiento
relativo entre objeto y sensor, se registran los pulsos de un mismo punto
de la superficie terrestre en dos momentos distintos de la trayectoria ,
con lo que la resolución es equivalente a la que se obtendría con una
antena de similar longitud a la distancia existente entre ambos puntos,
caso contrario a los sistemas de base terrestre como lo es la Telefonía
Celular que se ve seriamente afectados por dicho corrimiento. En
Conclusión
El
Corrimiento Doppler en los sistemas inalámbricos, como la radio, no es
mas que la pérdida parcial o completa de la señal que ha sido
transmitida, debido al movimiento de uno de los puntos involucrados en la
transmisión. Esto implica un cambio de frecuencia en la portadora que fue
recibida con respecto a la frecuencia de la portadora que fue transmitida. En
las comunicaciones el Corrimiento Doppler representa parte importante para
los sistemas inalámbricos ya que constituye la pérdida parcial o
completa de la onda portadora en un tiempo determinado. El
Corrimiento Doppler no afecta a todos los sistemas por igual puesto que,
los sistemas que trabajan en las bandas de frecuencias altas son mas
susceptibles a estos cambios de frecuencias que ocurren en la señal
transmitida, al igual que las transmisiones que se llevan a cabo a altas
velocidades, es decir , el Corrimiento Doppler es directamente
proporcional a las frecuencias y las velocidades con las cuales se realiza
la comunicación. Sin embargo, no en todos los sistemas inalámbricos se
puede decir que el Corrimiento Doppler es perjudicial , ya que existen
sistemas que se ven beneficiados por dicho corrimiento de frecuencias.
Interpretación Geométrica y Matemática Los
primeros satélites empleados para la radionavegación fueron los de la
serie estadounidense Transit(1960, operativo desde 1964). Se
desarrollaron para ayuda de navegación de los submarinos del tipo Polaris.
En este sistema los satélites siguen una órbita baja y transmiten
continuamente una misma frecuencia. Debido al movimiento orbital, desde
tierra se perciben unos desplazamientos Doppler de la señal. Conociendo
las coordenadas y esas desviaciones de frecuencia se puede conocer la
posición del observador. La principal desventaja de usar el método Dopper
era que no se disponían de los satélites las 24 horas del día. La geometría de la
constelación de satélites influye mucho en el error. Si el usuario se
encuentra en un lugar donde las rectas que le unen con los satélites son
casi perpendiculares entre ellas, el área de incertidumbre de intersección
será mucho menor. Si los ángulos no son perpendiculares el área de
incertidumbre será mayor. En el último caso se dice que presenta una
geometría pobre, y la exactitud puede ser 10 veces peor que con
buena geometría. Esa influencia de la geometría se expresa con el parámetro
GDOP (Geometrical Dilution Of Position) que multiplicado por los
demás errores da el error total cometido. El significado de este error se
ilustra en Ilustración 1 y Ilustración 2. El factor GDOP se puede descomponer en
varias componentes que dan más información sobre la naturaleza del
error: VDOP (vertical) ,HDOP (horizontal), PDOP (Position), TDOP (Time)etc… Generalmente
el receptor calcula GOP de las posiciones geográficas y estima los
demás errores para informar al usuario del error cometido. Además, como
los satélites se mueven a gran velocidad (232 Km/min) GOP varía
continuamente y el receptor debe elegir en cada momento los satélites que
mejor relación geométrica ofrezcan.
Ilustración
-1:
Situación de buena geometría. El área de incertidumbre es mínima para
los errores existentes.
Ilustración
-2: Situación de pobre geometría en que el error se amplifica. Eliminando la influencia de la
propagación en la ionosfera mediante el uso de DGPS se pueden conseguir
una precisión absoluta, con presencia de la disponibilidad selectiva,
mejor (1 metro) que la que consiguen los usuarios del código P sin
disponibilidad selectiva. Los gps
pueden utilizar tres métodos para determinar este tiempo: Sistema
Doppler, método de seudodistancias y método de medida de fase. El
sistema Doppler es bastante impreciso y prácticamente no se usa, para dar
una interpretación matemática utilizaremos el método de
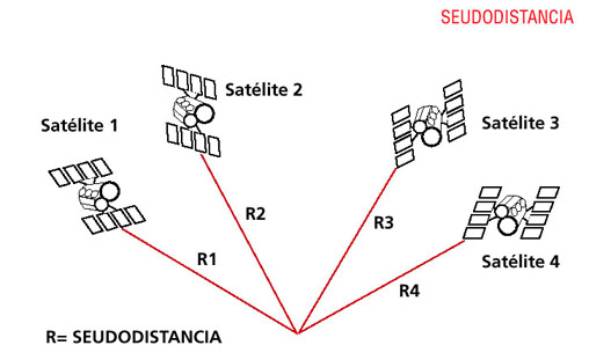
Seudo-Distancias Se emplean 4 satélites
respecto a los cuales el receptor calcula las distancias respectivas. En
realidad no se miden distancias, sino pseudodistancias. Veamos que
significa este concepto: [0]
[1]
[2]
[3]
[4]
Así pues, la
distancia real (que es la que realmente nos interesa) será: [5]
[6]
Para linealizar [6] y
facilitar así su resolución se pide al usuario que introduzca una posición
aproximada: [7]
Desarrollamos en
serie de Taylor en torno a este punto [8]
[9]
[10]
Si hay más de 4 satélites
visibles se calculan las pseudodistancias respecto a todos los satélites
visibles, obteniendo así un sistema con más ecuaciones que incógnitas,
lo que simplifica el cálculo de la posición.
Algunos detalles del
sistema GPS
Una
vez estacionados en el punto requerido y con el equipo completo en
funcionamiento, el receptor puede ofrecer al operador, a través de la
pantalla y con ayuda del teclado, una gran cantidad de información sobre
la observación que estamos realizando, tal como: ·
Número y nombre de los
satélites localizados. ·
Satélites en seguimiento.
·
Acimut de cada satélite
en seguimiento. ·
Elevación de cada satélite
en seguimiento. ·
Nuestra posición
aproximada actual. (longitud, latitud y altitud). ·
Dirección y velocidad del
movimiento, para navegación. ·
Bondad de la medida que
puede hacerse sobre cada satélite. ·
Edad o antigüedad de la
información ofrecida. ·
Progreso de la observación:
satélites que se pierden y captan, y número
de observaciones realizadas
a cada uno. ·
Nombre y número de la
sesión que damos a la estación de observación, así como la identificación
del operador y notas varias. ·
Registros meteorológicos
y datos locales introducidos. FUENTES
DE ERROR. Una
vez en proceso de toma de datos y con posterioridad a la visualización de
la información que nos muestra el receptor, también hemos de controlar
una serie de parámetros que van a condicionar de gran manera las
precisiones que podamos obtener: TIEMPO.
Dado
que en la información que nos llega de los satélites, estos nos
transmiten el tiempo exacto en el que empezaron a emitir su mensaje
codificado, y que los receptores miden, también, el tiempo exacto en el
que recibieron cada señal , podremos calcular una medida de distancia
entre el receptor y el satélite, conociendo la velocidad de propagación
de la onda y el tiempo transcurrido desde que se emitió la señal hasta
que fue recibida. El problema surgirá cuando los relojes del satélite y
el receptor no marquen el mismo tiempo, de tal manera que un microsegundo
de desfase se traduce en un error de 300 metros en la medición de la
distancia. IONOSFERA. La
ionosfera es la región de la atmósfera que se sitúa entre 50 y 1000 km.
aproximadamente sobre la superficie de la tierra. Posee la particularidad
de que los rayos ultravioletas procedentes del sol ionizan las moléculas
de gas que allí se encuentran liberando electrones, produciendo de esta
forma una dispersión no lineal en las ondas electromagnéticas enviadas
por los satélites, de manera que cada onda se decelera en un ritmo
inversamente proporcional al cuadrado de su frecuencia. La
manera utilizada para eliminar esta fuente de error es comparar la
información que recibimos, con 2 receptores lo suficientemente próximos
entre si afectando dicha perturbación a los dos por TROPOSFERA.
Estos
errores se cometen cuando se produce una refracción de las ondas según
las distintas condiciones meteorológicas de temperatura, presión y
humedad relativa del aire que encuentre a su paso. Las
efemérides de los satélites se pueden leer en cada uno de los mensajes
de navegación de cada satélite de la constelación. Dicha lectura, se
realiza en las estaciones del segmento de control. §
Influencia que sobre el
satélite tiene el campo magnético terrestre. §
Parámetros sobre la presión
de la radiación solar. §
Posibles fallos de los
relojes atómicos. §
Operatividad de cada uno
de los satélites. §
Posición estimada para
cada uno de los satélites dentro de la constelación global, etc. §
Los errores generados por
las efemérides tienen un efecto relativamente pequeño, fácilmente
compensable. EFECTO
MULTICAMINO. Se
produce cuando la onda sufre desviaciones, reflexiones, choques contra
objetos reflectantes en su camino hacia la antena. GEOMETRIA
DE LA OBSERVACION. Existen
tres factores principales que condicionaran la precision definitiva con la
que observemos un punto con GPS: A)
CONFIGURACION GEOMETRICA DE LOS SATELITES (DOP). Vamos
a ocuparnos del apartado A) o factor DOP (Dilution Of Precision), se
tratas del efecto de la con figuración geométrica de los satélites, que
es el ratio entre la incertidumbre de precisión y la incertidumbre en
distancia. Existen
diferentes DOP´s dependiendo de posición que se estee tratando en cada
momento, los mas comunes son: §
VDOP, Incertidumbre en
altura (vertical). §
HDOP, Incertidumbre 2D
(horizontal). §
PDOP, Incertidumbre 3D.
§
TDOP, Incertidumbre en
tiempo. §
HTDOP, Incertidumbre en
horizontal y de tiempo. §
GDOP, Incertidumbre 3D y
de tiempo. Utilizaremos
el valor de GDOP como criterio más importante para poder realizar la
observación con la geometría más favorable. Existen
tres métodos principales de posicionamiento aplicados en Topografía y
Geodesia:
ESTATICO
RELATIVO. Se
trata del clásico posicionamiento en el que dos o más receptores se
estacionan y observan durante un periodo mínimo de media hora (o más),
según la redundancia y precisión necasárias, y en función de la
configuración de la constelación local. El único requisito importante,
es el de que uno de los receptores deberá estar situado en un punto de
coordenadas muy bien conocidas. Los
resutados obtenidos pueden alcanzar precisiones muy altas, teóricamente
hasta niveles milimétricos. Existe
una variante denominada ESTATICO RAPIDO, pero es sólo utilizable con
receptores de doble frecuencia L1y L2 y que puedan recibir información
tanto del código C/A, como del código P. De esta forma se reducen los
periodos de observación hasta 5 o 10 minutos por estación, manteniendo
los mismos ordenes de precisión que para el método Estático. Los
receptores utilizados para éste método son mucho mas caros que los
normales de una sola frecuencia, además en tiempos de crisis se activa el
sistema AS (anti-spoofing) por parte del Departamento de Defensa de los
EEUU, que tiene por objetivo convertir el código P en otro Y, de las
misma características pero secreto y no descifrable por los receptores
comunes. CINEMATICO
RELATIVO. Consiste
en la determinación de tríos de coordenadas respecto al punto fijo de
forma rápida, aunque menos precisa que con el método anterior. Es
necesario elegir dos puntos fundamentales: el de referencia y el de
cierre. Con los demás puntos se configura un itinerario o poligonal con
inicio y final en el cierre. Es esencial en este método que, desde el
inicio al final de la observación, ambos receptores realicen registros
continuos de fase de la portadora sobre un mínimo de 4 satélites con común
seguimiento y adecuadamente distribuidos. En ningún momento se puede
perder la señal de los satélites, ni en los cambios de estación. El
tiempo de observación por punto puede oscilar entre 1 y 2 minutos, y la
precisión máxima a obtener estaría entorno a los 10-20 cm. PSEUDOCINEMATICO
RELATIVO. Requiere
un receptor estacionado en un punto conocido y otro observando en otros
puntos por al menos dos periodos de unos 5 minutos, separados por otro más
largo del orden de 1 hora. En
la práctica, hoy en día los métodos de trabajo más utilizados son el
ESTATICO Y EL ESTATICO RAPIDO, principalmente por las altas precisiones y
la fiabilidad obtenidas.
Como consecuencia de múltiples fuentes de error anteriormente comentadas, los receptores GPS posicionan con un cierto grado de incertidumbre. Ofrecen una estimación de la posición, valor medio, a lo largo de un intervalo de tiempo con una determinada dispersión. De forma estándar se puede caracterizar esta dispersión mediante el error cuadrático medio (ECM) definido como la raíz cuadrada de la media de los errores al cuadrado, pudiendo referirse a una, dos o tres dimensiones.
El error del NAVSTAR-GPS se expresa como el producto de dos magnitudes, a saber: · UERE: es el error equivalente en distancia al usuario, se define como un vector sobre la línea vista entre el satélite y el usuario resultado de proyectar sobre ella todos los errores del sistema. o Este error es equivalente para todos los satélites. o Se trata de un error cuadrático medio. · DOP (Dilution Of Precision): depende de la geometría de los satélites en el momento del cálculo de la posición. No es lo mismo que los 4 satélites estén muy separados (mejor precisión) que los satélites estan más proximos (menor precisión). El DOP se divide en varios términos: o GDOP (Geometric DOP), suministra una incertidumbre como consecuencia de la posición geométricade los satélites y de la precision temporal. o PDOP (Position DOP), incertidumbre en la posición debido únicamente a la posición geométrica de los satélites. o HDOP (Horizontal DOP), incertidumbre en la posición horizontal que se nos dá del usuario. o VDOP (Vertical DOP), suministra una información sobre la incertidumbre en la posición vertical del usuario.
Las principales fuentes de error son las siguientes: · Error en el cálculo de la posición del satélite. · Inestabilidad del reloj del satélite. · Propagación anormal de la señal (velocidad de propagación no es constante). Estos errores se corrigen a través de diferentes modelos que son transmitidos en el mensaje de navegación a los usuarios. Veremos como es el ruido del receptor el que se convierte en una de las principales fuentes de error del sistema. Error en el cálculo de la posición de los satélites Los satélites se desvían de las órbitas calculadas por diferentes razones, entre estas podemos citar: · Por la variación del campo gravitatorio. · Debido a variaciones en la presión de la radiacción solar. · Debido a la fricción del satélite con moléculas libres. Se ha estimado que las efemérides calculan la posición de los satélites con una precisión de 20 metros. Para disminuir (e incluso evitar) esta fuente de error se han construido varios algoritmos basados en datos experimentales (empíricos), los coeficientes de estos algoritmos se transmiten al usuario a través del mensaje de navegación para que se reduzca el error debido a esta fuente de error. Errores debidos a inestabilidades del reloj del satélite Los satélites emplean relojes atómicos muy precisos, pero con el paso
del tiempo pueden presentar alguna deriva. En el mensaje de navegación
uno de los parámetros que se enviaban era el estado del reloj del satélite
para tener controlado su funcionamiento. Errores debidos a la propagación de la señal Hemos supuesto que la velocidad de propagación de la señal es
constante, pero esto no es cierto. Especialmente cuando la señal se
transmite por la ionosfera y la troposfera. Por tanto las distancias
medidas no son las distancias reales.
Disolución de la Precisión y Eliminación por USA de la Disponibilidad Selectiva de los GPS
Los satélites transmiten continuamente su situación orbital y la hora
exacta. El tiempo transcurrido entre
la emisión de los satélites y la recepción de la señal
por parte
del receptor
GPS, se convierte en distancia mediante una simple fórmula
aritmética (el tiempo
es medido en nanosegundos).
Al captar las señales de un mínimo de tres satélites, por triangulación
el receptor GPS determina la posición que ocupa sobre
la superficie de la tierra mediante el valor de las
coordenadas de
longitud y latitud (dos dimensiones). Dichas coordenadas pueden
venir expresadas en grados, minutos y/o segundos o en las unidades
de medición utilizadas en otros sistemas geodésicos. La captación de
cuatro o más satélites facilita, además,
la altura del receptor con respecto al nivel del mar (tres dimensiones).
Las coordenadas
de posición y
otras informaciones que puede facilitar el receptor, se actualizan cada segundo o cada dos segundos. Errores Intencionales…
Aunque
resulte difícil de creer, el mismo Gobierno que pudo gastar 12.000
Millones de dólares para desarrollar el sistema de navegación más
exacto del mundo, está degradando intencionalmente su exactitud. Dicha
política se denomina "Disponibilidad Selectiva" y pretende
asegurar que ninguna fuerza hostil o grupo terrorista pueda utilizar el
GPS para fabricar armas certeras. Básicamente,
el Departamento de Defensa introduce cierto "ruido" en los datos
del reloj satelital, lo que a su vez se traduce en errores en los cálculos
de posición. El Departamento de Defensa también puede enviar datos
orbitales ligeramente erróneos a los satélites que estos reenvían a los
receptores GPS como parte de la señal que emiten. Estos
errores en su conjunto son la mayor fuente unitaria de error del sistema
GPS. Los receptores de uso militar utilizan una clave encriptada para
eliminar la Disponibilidad Selectiva y son, por ello, mucho más exactos. Afortunadamente
todos esos errores no suman demasiado error total. Existe una forma de
GPS, denominada GPS Diferencial, que reduce significativamente estos
problemas. CALIDAD
DE LAS SEÑALES EMITIDAS La
calidad de las señales
emitidas por los satélites,
llamada SQ, está en
función de la
posición que ocupen
en el firmamento,
en relación con
la situación de la antena del receptor,
o del estado operativo del satélite. La calidad de las señales
afecta a la precisión de las
informaciones ofrecidas por los
receptores. Algunos modelos
tienen escalas gráficas que indican la calidad de las señales
recibidas. Formas
de obtener nuestra posicion Con
código: Por
medio de este método y conociendo la distancia a por lo menos tres satélites,
podremos deducir nuestra posición. La seudodistancia es el resultado de
multiplicar la velocidad de la luz por el desplazamiento temporal
necesario para alinear (correlacionar) una réplica del código GPS,
generado en el receptor con la señal procedente del satélite. Aplicado
este procedimiento, y comparándose las coordenadas GPS obtenidas por
seudodistancia con las coordenadas conocidas del punto de control, se podrán
hallar incrementos o "deltas", que aplicados a las coordenadas
GPS del móvil, ofrecerán coordenadas muy aproximadas a las reales. Con
observaciones largas, se podrán obtener muy buenas precisiones, hasta del
orden de un metro.
Este
método es el que permite la máxima precisión. Se sabe que el receptor
GPS recibe una emisión radioeléctrica desde el satélite, modulada con
dos códigos y un mensaje. Este
procedimiento permite limpiar de modulación la onda portadora, y medir
sobre ella la evolución de la distancia satéliteantena receptora. Este método
se denomina correlación o cuadratura. Será necesario conectar una antena
especial al receptor GPS, la cual deberá poseer, básicamente, un
amplificador de las señales recibidas. Para
efectuar la correlación, harán falta dos circuitos fundamentales: uno
seguirá el código o los códigos y permitirá medir distancias (seudodistancias)
al satélite, como también disponer de la portadora original limpia de
modulación.
FRECUENCIAS
MILITAR Y CIVIL. Cada
satélite transmite series de datos en dos códigos
diferentes. Uno de los
códigos, el código P, está reservado para su utilización militar, el
otro código, llamado SPS, está destinado para uso civil. Cada código
tiene una frecuencia de emisión diferente. CODIGO
P : El código exacto, protegido conocido por las siglas PPS y también
llamado código P, está reservado para
un uso estrictamente militar y como su propio nombre indica ofrece
la máxima exactitud y
precisión. Se emite en la
frecuencia de 1.227,6 Mhz. CODIGO
SPS : El código de adquisición ordinaria, también llamado SPS o
C/A, es el código destinado a uso
civil. Todos los receptores GPS "civiles" están
sintonizados con este código. Se emite en la frecuencia de 1.575,42 Mhz. DISPONIBILIDAD
SELECTIVA La
estación central del
sistema GPS, situada
en Estados Unidos, degrada la precisión de las señales civiles (por
medio de una pequeña diferencia en
el tiempo de emisión/recepción)
de forma que ofrezca un pequeño
error, error estimado entre los 25 y 100
metros. Esta degradación de la señal es conocida como
disponibilidad selectiva
(SA). Esta diferencia en las coordenadas
de posición nada importante
para la utilización del GPS para
usos corrientes civiles, es debida a
motivos de seguridad, no hay
que olvidar que algunos sistemas de dirección de mísiles utilizan el
sistema GPS como guía. GPS
DIFERENCIAL Se
llama GPS diferencial (DGPS) al sistema modificado, desarrollado por los fabricantes de receptores civiles, que
pretende conseguir aproximarse a la precisión ofrecida por el código
militar. Para conseguir este aumento
de la precisión es necesario
acoplar al receptor
GPS, mediante
una conexión
interface especial, otro tipo de receptor. Este receptor complementario
(debe ser compatible) capta las señales emitidas
por una
red de radiobalizas situadas en estaciones costeras. Un
aparato que disponga de la función DGPS, interconectado
con un receptor
adecuado, puede
"burlar" la disponibilidad
selectiva impuesta por el Departamento de Defensa de USA, al disponer de
otra serie de datos complementarios, ofreciendo
de esta manera, una precisión
en las coordenadas de posición
que oscila entre los cinco y los diez metros. La
utilización del
sistema DGPS solo es
aplicable en la
navegación marina, siendo especialmente útil
en las maniobras de atraque con poca visibilidad.
Control perfecto
del tiempo Si la medición del tiempo de viaje de una señal de
radio es clave para el GPS, los relojes que empleamos deben ser exactísimos,
dado que si miden con un desvío de un milésimo de segundo, a la
velocidad de la luz, ello se traduce en un error de 300 km! Por
el lado de los satélites, el timing es casi perfecto porque llevan a
bordo relojes atómicos de increíble precisión. ¿Pero
que pasa con nuestros receptores GPS, aquí en la tierra? Recordemos
que ambos, el satélite y el receptor GPS, deben ser capaces de
sincronizar sus Códigos Pseudo Aleatorios para que el sistema funcione. Si
nuestros receptores GPS tuvieran que alojar relojes atómicos (Cuyo costo
está por encima de los 50 a 100.000 U$S) la tecnología resultaría
demasiado costosa y nadie podría acceder a ellos. Por
suerte los diseñadores del sistema GPS encontraron una brillante solución
que nos permite resolver el problema con relojes mucho menos precisos en
nuestros GPS. Esta solución es uno de los elementos clave del sistema GPS
y, como beneficio adicional, significa que cada receptor de GPS es en
esencia un reloj atómico por su precisión. El
secreto para obtener un timing tan perfecto es efectuar una medición
satelital adicional. Resulta
que si tres mediciones perfectas
pueden posicionar un punto en un espacio tridimensional, cuatro
mediciones imperfectas pueden lograr lo mismo. Esta
idea es fundamental para el funcionamiento del sistema GPS, pero su
explicación detallada excede los alcances de la presente monografia. De
todos modos, aquí va un resumen somero: Una medición adicional remedia el
desfasaje del timing. Si
todo fuera perfecto (es decir que los relojes de nuestros receptores GPS
lo fueran), entonces todos los rangos (distancias) a los satélites se
intersectarían en un único punto (que indica nuestra posición). Pero
con relojes imperfectos, una cuarta medición, efectuada como control
cruzado, NO intersectará con los tres primeros. De
esa manera la computadora de nuestro GPS detectará la discrepancia y
atribuirá la diferencia a una sincronización imperfecta con la hora
universal. Dado
que cualquier discrepancia con la hora universal afectará a las cuatro
mediciones, el receptor buscará un factor de corrección único que
siendo aplicado a sus mediciones de tiempo hará que los rangos coincidan
en un solo punto. Dicha
corrección permitirá al reloj del receptor ajustarse nuevamente a la
hora universal y de esa manera tenemos un reloj atómico en la palma de
nuestra mano! Una
vez que el receptor de GPS aplica dicha corrección al resto de sus
mediciones, obtenemos un posicionamiento preciso. Una
consecuencia de este principio es que cualquier GPS decente debe ser capaz
de sintonizar al menos cuatro satélites de manera simultánea. En la práctica,
casi todos los GPS en venta actualmente, acceden a mas de 6, y hasta a 12,
satélites simultáneamente. Ahora
bien, con el Código Pseudo Aleatorio como un pulso confiable para
asegurar la medición correcta del tiempo de la señal y la medición
adicional como elemento de sincronización con la hora universal, tenemos
todo lo necesario para medir nuestra distancia a un satélite en el
espacio. Pero,
para que la triangulación funcione necesitamos conocer no sólo la
distancia sino que debemos conocer dónde están los satélites con toda
exactitud. Veremos
cómo lo conseguimos. Obtener un Timing Perfecto
LIMITACIONES
DEL GPS. El
GPS es, sin
duda, el más
sencillo y preciso
sistema de
navegación disponible en la actualidad, sin embargo
no debe ser el único instrumento de navegación de un vehículo,
ya que además de poder
estropearse, el departamento
de defensa de
USA puede (ya
lo ha hecho en
alguna ocasión) interrumpir, modificar o degradar las señales
cuando lo considere oportuno. Las
señales emitidas por los satélites
se comportan, en cierto modo como
la luz, ya que pueden traspasar el cristal y el plástico, sin
embargo no pasan a través de montañas, túneles,
edificios, superficies metálicas o
estructuras similares. La
antena de
los receptores debe
estar orientada de forma que tenga "acceso visual" a los satélites. En
el modo navegación, un
receptor GPS indica la
distancia que falta para
alcanzar un punto de destino en línea
recta. Hay que tener en cuenta que
en la tierra es
prácticamente imposible, incluso
en el desierto, seguir una trayectoria
recta por largos
periodos ya que
los accidentes
orográficos obligan a variar la dirección con frecuencia. NOMBRE
Y DESCRIPCION DE LAS FUNCIONES POSICION:
Indica la posición del GPS.
Facilita la localización casi exacta
del receptor. Para ello el GPS tiene que haber captado las señales
emitidas al menos por tres satélites. ALTURA:
al captar 4 o más
satélites el GPS indica
la altura sobre el nivel del mar. (sensible a Disponibilidad Selectiva) TIEMPO:
el GPS una
vez inicializado, aunque
no reciba señales
satelitales indica la hora y fecha, si recibe señales indica la hora
exacta. PUNTO
DE PASO o PUNTO DE REFERENCIA: El
waypoint es la posición de un único
lugar sobre
la superficie
de la tierra expresada
por sus coordenadas. Un waypoint puede
ser un punto
de inicio, de
destino o un
punto de paso
intermedio en
una ruta.
Todos los GPS pueden
almacenar en memoria varios Waypoints,
los cuales
se pueden borrar,
editar, e identificar
mediante caracteres alfa numéricos. Algunos
GPS permiten agrupar
una sucesión de
waypoints representando
un recorrido, a esto se le llama ruta. DISTANCIA:
introduciendo las coordenadas de
dos puntos, la función distancia del GPS
informa la separación
de ambos y el rumbo
en grados que hay que
seguir desde el marcado como inicio al
de destino. Lo mismo puede realizarse con dos waypoints. NAVEGACION:
Introduciendo un waypoint como destino
y otro como origen, esta
función facilita actualizando continuamente los siguientes datos: -Rumbo
de contacto (Bearing),
rumbo expresado en
grados que debemos seguir desde la posición actual para llegar al
destino. -Rumbo
actual (Heading track) Rumbo en grados que llevamos en ese momento. Un GPS
es una brújula exacta no afectada
por campos magnéticos o metales de los vehículos. -Distancia:
el GPS nos informa la
distancia que falta en
línea recta para llegar a
nuestro punto de destino. -Error
transversal: (CDI, XTE) El GPS nos informa del alejamiento transversal de
la trayectoria ideal en línea recta desde el inicio al destino. -Velocidad:
(Speed) Velocidad a la que se está desplazando el GPS. -Tiempo
estimado de llegada: (ETA,TTG) Indica
el tiempo estimado de llegada
al destino en línea recta
manteniendo constante la velocidad (por razones obvias solo aplicable a navegación aérea
o marítima.) -Tiempo
estimado de
viaje: (ETE)
Tiempo estimado de viaje a la velocidad indicada por el GPS. SET
UP: La función set up
se utiliza para programar
el GPS y controlar la forma
que ofrece la información, por ej.
si los datos queremos que aparezcan en millas o km, en pies o metros. etc.
al igual que el sistema de coordenadas que pueden utilizar los sistema Lat/Lon,
UTM, y los diferentes GRID. -Datum
(map datum)
representa un sistema
geométrico de
la tierra. La
subfunción DATUM permite
seleccionar entre los
diferentes sistemas en
que están basados los mapas y cartas marinas. -Norte
de Referencia: (North
Reference) Permite elegir
el modelo de norte (magnético,
indicado por las
brújulas) o verdadero
(true) que el GPS toma para indicar las informaciones sobre rumbo actual y
de contacto. -Unidades
de distancia: (Dist. units) Esta subfunción permite seleccionar las
unidades de longitud de la información (km, millas y millas marinas) -Unidades
de elevación: (Elev. units) Esta permite elegir entre metro y pies. -Hora:
(Time) Selecciona el
formato de la hora,
se puede elegir entre
UT (universal time) y GMT. Algunos modelos también traen la hora local.
http://www.nautigalia.com/gps/index5.htm http://www.efdeportes.com/efd9/gps.htm http://www.tel.uva.es/~jpozdom/telecomunicaciones/tutorial/contenido.html http://www.jeuazarru.com/html/gps.html http://www.upv.es/satelite/trabajos/pracGrupo4/sistmed.htm http://www.inaoep.mx/~rincon/doppler.html http://www.al-top.com/al_top/Gps-art.htm#ObtInfo http://www.tel.uva.es/~jpozdom/telecomunicaciones/portadagps.html http://www.tel.uva.es/~jpozdom/telecomunicaciones/tutorial/capitulo2.html http://www.nautigalia.com/gps/index1.htm#medida%20de%20los%20retardos http://www.mundogps.com/mundogps/formacion/conceptos/SistemasMedida.asp http://telecom.iespana.es/telecom/gps/index.htm http://www.geoinfo-int.com/articulos/comofuncionanGPS_1.htm http://www.udec.cl/~laecheve/gps.htm
|
|||||||||||||||||

 ---- relación fDoppler ~ desplazamiento Doppler
---- relación fDoppler ~ desplazamiento Doppler