Conceptos básicos sobre control de
procesos
En
esta figura se observa el diagrama simplificado de un sistema de control de
procesos.
E
es el error o desviación encontrado al medir el valor Cm de la
variable en relación a su valor de SET-POINT Csp, es decir,
E= Csp - Cm

El
valor de E está relacionado con la variable dinámica del proceso (flujo,
temperatura, nivel, presión, etc.) de forma que a través del circuito de
control se procese la acción correctora necesaria para estabilizar el sistema.
El
valor de Cm viene proporcionado por un medidor en el que hay un transductor
adecuado al proceso. El transductor es un dispositivo que convierte una
determinación magnitud, normalmente no eléctrica, en otra que generalmente sí
lo es.
En
la figura anterior se observa que la señal de salida del controlador está
aplicada a un dispositivo denominado conversor, cuyo función es transformar la
señal eléctrica, que proviene del controlador, en una magnitud no eléctrica que
actuará sobre el elemento que posee acción directa sobre el proceso (elemento
final de control). Normalmente las señales de entrada y salida del controlador
son corrientes situadas en una banda patrón de 4 a 20 mA. El proceso tiene
realimentación negativa, de manera que su tendencia es la de ir reduciendo el
error de la variable controlada hasta que el sistema es estabilice en un valor
compatible con el SET-POINT.
Evidentemente, alguna perturbación en el sistema podrá volver a alternar la estabilidad obligando al controlador a entrar en escena de nuevo para indicar la inestabilidad e intentar corregirla.
Finalmente,
conviene señalar que el controlador es el elemento básico del sistema, pues
actúa como cerebro del mismo: analiza la señal de error y determina la salida
necesaria para corregir la inestabilidad. A fin de calcular la señal de salida,
el controlador precisa ser ajustado para el tipo de acción correctora necesaria
en el proceso. Esta acciones se denominan de control, y básicamente son de los
siguientes tipos:
a)
acción
proporcional o acción-P
b)
acción
integral o acción-I.
c)
acción
derivativa o acción-D
Los tres pueden
combinarse para proporcionar acciones de control más efectivas sobre el
proceso. Esto es, podemos tener acción-PI (proporcional + integral), acción-PID
(proporcional + integral + derivativa), etc.
Controlador de acción proporcional
El
tipo más elemental de control es el llamado ON-OFF en el que la salida del
proceso está siempre con 0 o 100 % de respuesta.
Una
extensión natural del control ON-OFF es el control proporcional. En este tipo
de acción existe una relación lineal entre la señal de error (E) de entrada y
la salida (Po) del controlador. Por lo que la salida del proceso tendrá una
respuesta proporcional a la señal de mando del controlador.
La
acción del controlador esta determinada por la señal de error (E) detectada por
él. Cuando el error es nulo, el controlador ofrece una salida de valor P1.
La
figura 1 corresponde a una ecuación de la forma:
Po=KpE+P1
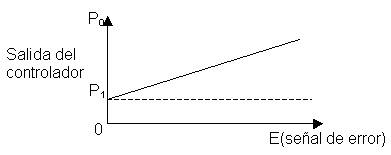
Figura 1
donde Kp es una constante de
proporcionalidad (o ganancia de acción proporcional).
Toda
variable controlada posee un valor máximo (Cmáx) y otro mínimo (Cmín).
Relacionando el error (E) con este intervalo de variación podría expresarse en
tanto por ciento. Siendo así, se suele definir un error porcentual Ep
por
Ep =((Cm-Csp)
·100)/(Cmáx-Cmín)=E/DC·100
La
siguiente figura (figura 2) muestra la realización práctica de un circuito con
Opam’s cuyo funcionamiento se adecua a la ecuación de Ep. se puede
observar que el potenciómetro R1 permite el ajuste de la constante de
proporcionalidad (Kp)

Figura 2
La ecuación de salida del circuito es
Vo=(R2/R1)VE+V1
donde
Vo
corresponde a la señal de salida Po.
VE
corresponde a la señal de error E.
V1
corresponde a la señal de salida P1 cuando el error es nulo.
(R2/R1)
corresponde a la constate de proporcionalidad Kp.
En
la entrada del controlador las corrientes se convierten en tensiones y en la
salida se lleva a cabo el proceso inverso, todo elo a través de resistencias de
alta precisión.
Controlador de acción integral.
La
acción integral es aquella en la que la salida del controlador aumenta en
proporción a la integral del error de la variable controlada. Esto es, la
salida del controlador es la integral del error a lo largo del tiempo,
multiplicada por una constante de proporcionalidad denominada ganancia de
integración.
Este
tipo de acción se aplica en el control de velocidad de motores de corriente
continua. El controlador detecta continuamente los errores y genera rampas de
aceleración o desaceleración, según convenga, para mantener la velocidad del
motor en un valor preajustado (SET-POINT).
La
ecuación de salida del controlador de integración es
Po(t)=K1òt0 E(t)dt+P1(0)
donde K1 es la ganancia de
integración y P1(0) la salida
del controlador en el instante t=0.
El
esquema de la figura 3 puede utilizarse para realizar un circuito que se ajuste
a la ecuación anterior. Su salida viene dada por
v0(t)=1/(RC) òt0 vE(t)dt+v1(0)
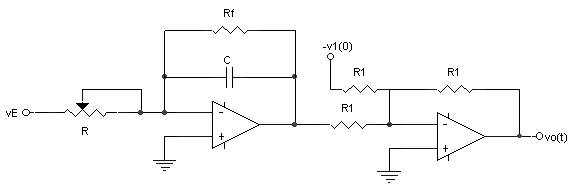
Figura 3
v0(t)
corresponde a la señal de salida Po(t)
vE(t)
corresponde a la señal de error E(t)
v1(0)
corresponde a la señal de salida P1(0) en t=0
1/(RC)
corresponde a la ganancia de integrador K1
Controlador de acción derivativa
La
acción derivativa es aquella en la que la salida del controlador es
directamente proporcional a la variación del error (o de la desviación) de la variable controlada. Por ello, esta
acción nunca se utiliza aisladamente, sino asociada con las anteriores, ya que
en el caso de tener un error nulo o constante la salida del controlador no
representaría ninguna variación nominal de la señal de salida.
La
ecuación de salida de este controlador viene dada por
Po(t)=KD·dE(t)/dt
donde KD es una constante de
proporcionalidad denominada ganancia derivativa.
El
circuito de la figura 4 puede utilizarse para llevar a la práctica la ecuación
anterior. La salida de este circuito es
v0(t)=R2
C · dvE(t)/dt
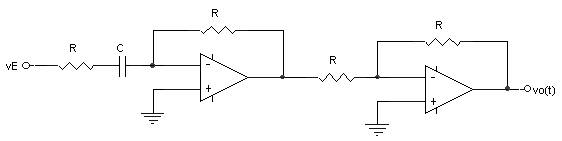
Figura 4
donde
v0(t) corresponde a
la señal de salida Po(t).
vE(t) corresponde a
la señal de salida E(t).
R2 C corresponde a la ganancia
derivativa KD.