II.-
Principios Generales de Digitalización de Redes de
Telecomunicaciones.![]()
a.)
Aspectos Básicos de la Digitalización.![]()
En los equipos de comunicaciones de naturaleza analógica, las señales a manejar, procesar o transmitir se encuentran representadas por voltajes cuyas amplitudes y/o frecuencias varían de una forma continua con relación al tiempo (ver Figura 27); en particular, en un sistema telefónico, las señales transportadas constituyen una réplica de las ondas de voz.
Fig 27. Señal analógica continua en el tiempo.
Las señales digitales, por su parte, no son de una naturaleza continua, sino que consisten en impulsos discretos de voltaje o corriente que representan la información a procesar. Los voltajes digitales pueden variar únicamente en pasos discretos; normalmente se utilizan dos únicos niveles de voltaje, uno de los cuales es cero, de modo que es posible emplear dispositivos de dos estados, usualmente uno y cero (ver Figura 28). Un dispositivo de dos estados es aquel que dispone de sólo dos estados estables, de manera que trabaja o no trabaja, es decir, conduce o se encuentra bloqueado.
Fig 28. Señal digital discreta en el tiempo.
Las ventajas a conseguir con la utilización de las técnicas digitales, en lugar de los métodos analógicos, se derivan del empleo de sólo dos niveles de voltaje. La circuitería digital, principalmente basada en circuitos integrados en los sistemas actuales, trabaja mediante la conmutación de transistores entre la saturación y el bloqueo, no precisando generar o detectar valores exactos de voltaje y/o corriente en puntos particulares de un equipo o sistema. Por esta causa, producir circuitería digital en forma masiva es más sencillo y económico.
Además, la naturaleza binaria de las señales hace mucho más sencillo obtener un rendimiento de operatividad exigido, a partir de un gran número de circuitos. Por lo general, los circuitos digitales son más confiables que los analógicos, ya que se van a producir fallas debido a variaciones en el funcionamiento por causa de cambios de los valores de los componentes, desajuste de equipos, etc.
Adicionalmente, en un sistema digital los efectos del ruido y de las interferencias quedan muy reducidos, ya que los impulsos digitales siempre pueden regenerarse y quedar como los originales, donde quiera que su forma de onda se haya distorsionado (ver Figura 29). Ello no es posible en un sistema analógico, donde el efecto de señales indeseables de ruido e interferencia es la degradación permanente de la señal.
Fig 29. Regeneración de señales digitales. Cada vez que se detecta un impulso distorsionado, se transmite a la línea uno nuevo regenerado (no distorsionado), el cual representa el 100 % de la información.
Ya que una señal digital solo puede tener un número finito de valores (usualmente dos), la posibilidad de que se añadan ruidos a lo largo de la transmisión es mucho menor que en señales analógicas que tienen un número infinito de valores y en las que cualquier ruido variará el contenido de la comunicación.
Con un sistema analógico, la forma de la señal está directamente correlacionada a la información de la misma, por lo tanto, cualquier cambio en la forma causará una pérdida de información. Por otra parte, en un sistema digital no es la forma, sino más bien la presencia o ausencia de la señal lo que se correlaciona con la información. En este sistema, por consiguiente, aún un pulso muy distorsionado, siempre y cuando se regenere en un receptor como un pulso, representa el 100 % de la información.
Los datos de distintas velocidades pueden ser transmitidos de forma mucho más eficaz por el sistema digital que por el analógico. Las señales vocales, las visuales y las de datos para los clientes, así como las señales de supervisión y control para conectar y desconectar a través de la red, pueden ser transmitidas con técnicas digitales de forma unificada.
Las técnicas digitales permiten el empleo y manejo de señales sofisticadas y eficaces. La operación digital reduce considerablemente la redundancia y el uso de microordenadores económicos ofrece oportunidades de efectuar operaciones más sofisticadas, tales como la extracción de datos. Adicionalmente, la información digital puede almacenarse temporalmente sin distorsión en memorias digitales que vienen abaratándose. El almacenaje temporal permite un uso más eficaz de las instalaciones de la red y ofrece una gran variedad de ventajas tales como conversión de velocidades y regeneración de señales. Las técnicas digitales ofrecen una mejor interfaz con computadoras y con terminales de abonado.
La mayor desventaja de la comunicación digital reside en que se requiere un ancho de banda del sistema mayor para comunicar la misma información en formato digital en comparación con el analógico.
Existen dos razones principales por las cuales la aplicación de las técnicas digitales, tanto en la electrónica en general como en las telecomunicaciones en particular, se ha visto limitada en su extensión hasta los últimos años. En primer lugar, la circuitería digital no era, en su mayor parte, económica, hasta que los circuitos integrados estuvieron plenamente disponibles; en segundo lugar, el transporte de señales digitales exige la provisión de circuitos con un ancho de banda muy grande. Aunque algunos circuitos y equipos digitales han estado disponibles desde los días de los circuitos preintegrados, su extensión y aplicación estaban muy limitadas.
Aunque las técnicas digitales presentan indudables ventajas significativas, nos encontramos en un mundo donde los fenómenos como el sonido y la luz son de una naturaleza fundamentalmente analógica, esto es, ondas variables en forma continua. Por lo tanto, es necesario poder llevar a cabo la conversión de un sistema de ondas analógicas a este otro mundo digital.
Ya que lo que se requiere es disponer de un sistema basado en dos estados (por ejemplo, si o no, uno o cero), la forma más sencilla de un sistema de comunicación de este tipo es el denominado binario, en el cual a cada elemento de información se le asigna uno de dos posibles estados. El elemento básico de información en el sistema binario se conoce como bit, que es la abreviatura de "binary digit" (dígito binario, ver Figura 30). El bit puede valer 1 ó 0. A un estado se le conoce como marca y al otro como espacio. Eléctricamente, estos estados se indican por la presencia o ausencia de flujo de corriente.

Fig 30. Dígito binario (Binary digit - Bit).
El código binario es un método para representar números. Normalmente, los números se rigen por el código decimal (o de 10 estados). Un dígito individual en el código decimal puede representar cualquiera de 10 valores unitarios diferentes, de cero a nueve, y se escribe como uno de los dígitos 0,1,2,3,...,9. Los números mayores de nueve se representan con dos o más dígitos: el veinte, por ejemplo, se representa como 20, el dos indica las decenas, de modo que dos por diez se debe sumar a 0 unidades, haciendo un total de veinte. Este principio se extiende a números más grandes.
En un sistema binario, un dígito individual se limita a uno de dos valores, cero o uno. Al igual que en el caso decimal, los valores mayores se pueden representar utilizando más dígitos. Por ejemplo, el dos se representa con los dígitos uno-cero, es decir 10. Por lo tanto en el esquema de código binario 10 no significa diez sino dos.
Cualquier número se puede representar en el sistema binario, así como cualquier número se puede representar en el decimal. Cuando se expresan en binario, todos los números consisten sólo de 0’s y 1’s arreglados como serie de dígitos binarios. La corriente de bits de un número binario normalmente se denota con una B para indicar número binario. Esto evita confusión de que el número pueda ser decimal. Así, por ejemplo, 41 se escribe como 101001 B.
A menos que se establezcan ciertas reglas, puede haber ambigüedad sobre cual condición, 1 ó 0, es una marca o un espacio. Para evitar confusión y establecer identidad única en las condiciones binarias, el CCITT en su Rec. V.1, establece designaciones binarias equivalentes. Esta recomendación define el sentido de la comunicación de manera que la marca y el espacio, el "1" y el "0", respectivamente, no se inviertan.
Se puede codificar cierto número de bits para identificar una gran cantidad de información. Este número se conoce como carácter. En un código binario, la cantidad "N" de caracteres diferentes disponibles para información es igual a dos elevado a la potencia "n" que corresponda a la cantidad de elementos o bits por carácter (N=2n). Por ejemplo, en una información basada en un código de tres elementos o bits por carácter, existen ocho posibilidades o caracteres de información, es decir, 23.
La ventaja del sistema de código binario es la facilidad con la cual la información (los números binarios) se puede representar en forma eléctrica. Como cada dígito, o bit, de un número binario sólo puede ser 0 ó 1, todo el número se puede transmitir fácilmente como serie de pulsos eléctricos de prendido o apagado (espacio y marca). Así, cuarenta y cinco (101001 B) quedaría representado por prendido-apagado-prendido-apagado-apagado-prendido.
Los números representados en formato binario pueden ser usados para codificar toda la información a ser transmitida a través de la red digital. Diferentes formatos de archivos tendrán diferentes métodos de codificación en binario. Los formatos de texto usan el código ASCII (American Standard Code for Information Interchange) en donde a cada letra y símbolo del alfabeto se le asigna un número que es representado por una secuencia binaria.
Las imágenes son transportadas con una serie de bits que representan cada pixel. A cada color se le asigna un número, el cual es representado por una secuencia de bits para cada pixel. Las imágenes con más colores tomarán más espacio, ya que un mayor número de bits por pixeles serán necesarios para aceptar el mayor número de colores posible.
Las señales telefónicas analógicas, por su parte, son convertidas a digitales haciendo un muestreo a la amplitud de la señal analógica 8000 veces cada segundo. El nivel de amplitud en cada punto de muestra es representado por un código binario de 8 bits, generando una señal de voz digitalizada a ser transportada a 8000 x 8 = 64000 bits/seg., o 64 kbit/seg.
b.)
Digitalización de la Red de Transmisión.![]()
En un principio, la transmisión digital, esto es, el transporte de la información como una secuencia de bits, sólo fué costeable en las redes de troncales urbanas en donde se introdujo para aliviar el congestionamiento de los cables. Pero como resultado de la miniaturización y la integración a gran escala de los componentes electrónicos, rápidamente se convirtió en la posibilidad adecuada para todos los sistemas de transmisión. En la actualidad, en muchos países con redes internacionales de satélite y submarinas, la transmisión digital se ha establecido como el estándar para el envío de información y otras señales sobre las redes de telecomunicación y a medida que las redes mundiales se modernizan, se está imponiendo tan rápidamente sobre la tecnología analógica antigua, que dentro de pocos años todo el equipo de telecomunicaciones será digital.
Tradicionalmente, las señales procedentes de una fuente de información analógica, es decir, aquella cuyos valores varían de forma continua con el tiempo, como la voz y el video, han sido transmitidas también en forma analógica. La aplicación de técnicas digitales a la transmisión de esas señales las transforman, por conversión, en señales digitales, esto es, en funciones que adoptan sólo valores discretos con el tiempo, representadas por dígitos o bits, tal como la información procedente de señales de datos. Esto permite una utilización más eficaz de los diferentes medios de transmisión y un tratamiento homogéneo de las señales con independencia de cual sea la fuente de información original (voz, video o datos).
El principal parámetro que caracteriza un medio de transmisión es el constituido por la banda de frecuencias que es capaz de transmitir en determinadas condiciones. Si se considera una información procedente de una fuente analógica (voz, música, etc.), estará formada por un cierto conjunto de frecuencias comprendidas en una banda bastante baja (inferior a 15 kHz). Si se desea transmitir por un medio de transmisión cuya banda de trabajo sea de, por ejemplo, 300 a 500 kHz, habrá que conseguir que esa información se imprima sobre un conjunto de frecuencias que caiga dentro de esa banda. Este proceso de "impresión" es lo que se conoce como modulación.
En un proceso de modulación, se debe trasladar la información que lleva una determinada señal (moduladora) a otra señal (portadora) que es la que reúne las características que se desean. Por ello, se actúa sobre algunos de los parámetros de esta segunda, a objeto de que varíe en función de la información que contiene la primera.
Si una señal original analógica (señal moduladora) se quiere transformar en digital, se deberá utilizar una señal portadora de carácter impulsivo, que esté formada por una serie de impulsos iguales, separados entre sí en un determinado intervalo de tiempo. En una señal impulsiva son tres los parámetros que la caracterizan: la amplitud de los impulsos, la anchura de los mismos y la posición que ocupa, o puede ocupar, cada uno respecto a la teórica, esto es, la que debería ocupar si no estuviese modulada por la señal analógica.
En el caso de hacer variar la amplitud de los impulsos en función de la señal moduladora, se obtiene la modulación por impulsos en amplitud (Pulse Amplitude Modulation-PAM). Si es la anchura de cada impulso la que adopta un valor proporcional a la amplitud de la moduladora en ese instante, se obtiene la modulación por impulsos en anchura. Finalmente, puede hacerse que la posición de cada impulso varíe, respecto a la teórica, en función de la moduladora. Así se obtiene la modulación de impulsos por posición (ver Figura 31).
Fig 31. Modulación Analógica-Impulsiva.
Existe una cuarta forma de modulación impulsiva, cuya filosofía es algo más elaborada y compleja que la de las tres precedentes. Partiendo de una señal impulsiva modulada en amplitud (PAM), se procede a asignar a cada impulso un valor numérico en función de la amplitud que presenta. Seguidamente, se representa ese número mediante una palabra de código binario, a base de un conjunto de impulsos de amplitud fija, por ausencia o presencia de los mismos ("unos" y "ceros", es decir, bits o dígitos). Este procedimiento es denominado Modulación por Impulsos Codificados (MIC, o PCM – Pulse Code Modulation).
La modulación por codificación de impulsos es un método de modulación mediante el cual la onda analógica continua se transmite en un modo digital equivalente resultando, por lo tanto, una señal binaria en serie o corriente de bits, la cual se puede aplicar o no a la línea de transmisión sin necesidad de etapas adicionales de modulación. Este tipo de modulación lo inventó en los años treinta el ingeniero inglés Alec Reeves en los laboratorios de la ITT en París, pero fué hasta la década de los 60 que se empezó a aplicar. Esto se debió principalmente a que, antes de la electrónica de estado sólido, no se contaba con la tecnología para instrumentar de manera efectiva los principios conocidos de PCM.
Para obtener la señal PCM a partir de una o varias señales analógicas, se requieren tres etapas de proceso: muestreo, cuantificación y codificación (ver Figura 32).

Fig 32. Etapas del proceso de modulación por impulsos codificados.
Una señal analógica a transmitir de manera digital, procedente de una conversación telefónica por ejemplo, está constituida por una onda de baja frecuencia, de forma continua y con amplitud variable, y es preciso someterla inicialmente a un proceso de muestreo. En esencia, muestrear una señal consiste en realizar una serie de mediciones de la amplitud de la señal en unos instantes de tiempo determinados. La periodicidad con la que se tomen esas muestras se denomina período de muestreo e influye en la posterior reconstrucción de la señal.
Ya que no se pueden representar por impulsos los valores de la señal en todos los instantes de tiempo, debido a que se obtendría un espectro continuo, confundiéndose unos impulsos con otros, se deben elegir determinados puntos de esa señal separados por un cierto intervalo de tiempo "t" (ver Figura 33), y representar la amplitud que en ese momento tenga mediante un impulso cuya amplitud sea proporcional a ella.
Figura 33. Muestreo de una señal analógica.
Si el muestreo se realiza de forma correcta, las muestras no sólo representan una buena aproximación a la señal original, sino que contienen toda la información de esa señal. Esto está establecido en un teorema de la teoría de la información, el Teorema de Nyquist, que expresa lo siguiente: "Si una información, que es una magnitud función continua del tiempo, se muestrea instantáneamente a intervalos regulares a una frecuencia que sea al menos dos veces la frecuencia más alta de dicha información, las muestras obtenidas contienen toda la información original".
En vista de que el muestreo ideal; esto es, la toma de muestras en tiempos infinitesimales (impulsos de duración cero) es prácticamente imposible, se debe utilizar una serie de impulsos de corta duración, efectuando el muestreo durante el tiempo que dure el impulso. De aquí que, según se tome la muestra de la señal durante la duración del pulso, existen dos tipos de muestreo práctico: el natural y el instantáneo.
En el muestreo natural, la muestra tomada sigue a la señal original, tal como se presenta en la figura 34.
Figura 34. Muestreo práctico natural. Las muestras tomadas siguen el contorno de la señal original.
Por su parte, en el muestreo instantáneo, las muestras no siguen a la señal original, sino que toman el valor de la señal en el punto medio del pulso de muestreo. En los sistemas PCM se utiliza este segundo tipo de muestreo, obteniéndose una señal por impulsos modulados en amplitud (PAM - Pulse Amplitude Modulated) como la mostrada en la figura 35).
Figura 35. Señal de impulsos modulados en amplitud (PAM), que resulta del proceso de muestreo práctico instantáneo.
El conjunto de impulsos modulados en amplitud, que se obtiene como resultado del muestreo, presenta la característica de que las amplitudes de tales impulsos varían de forma analógica, es decir, pueden adoptar cualquier valor (V1, V2, etc.). Esto representa un importante inconveniente a la hora de asignar una palabra código que represente cada una de esas amplitudes, ya que se precisaría un sistema de codificación con infinitos valores posibles. Hay que conseguir que sólo exista un número discreto o finito de posibles valores, y para ello se deben cuantificar tales amplitudes. Es decir, se debe definir una escala de valores fijos (C1, C2, etc.) y asignar a cada amplitud (V1, V2, etc.), que estará comprendida entre dos valores cuánticos sucesivos, aquel de los dos que se halle más cerca de su valor real (ver Figura 36).

Figura 36. Cuantificación de muestras de una señal analógica.
La diferencia existente entre el valor real de la muestra y el valor de la escala que lo suplanta se conoce como Error o Ruido de Cuantificación (ver Figura 37), el cual es inevitable, y mayor cuanto más elevado sea el intervalo entre valores cuánticos contiguos. No obstante, esta distorsión estará controlada, ya que tendrá un valor constante, función de la escala de cuantificación que se elija, y bastará mantenerlo por debajo del límite que se estime conveniente, el cual puede ser tan pequeño como se desee.
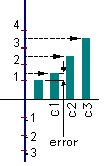
Fig 37. Error de Cuantificación.
La cantidad de ruido introducida por el proceso de cuantificación es constante y no depende de la amplitud de la señal sino del número de niveles cuánticos elegido, es decir, de la magnitud del intervalo entre dos niveles sucesivos. Sin embargo, en las amplitudes de valor bajo, la relación señal/ruido será peor que en las amplitudes de mayor magnitud, ya que el denominador es siempre el mismo. Este distinto valor de la relación señal/ruido de unas muestras respecto a otras es indeseable.
Si se fija un número de escalones cuánticos bastante elevado para que la relación señal/ruido en niveles bajos de señal sea aceptable, se estará obteniendo una relación señal/ruido innecesariamente buena en los niveles altos, y complicando la codificación, ya que se aumentará el número de palabras código necesarias.
La solución a esta situación ha sido realizar, asociado a la cuantificación, un proceso que asigne intervalos cuánticos más separados a las amplitudes altas y, más juntos a las bajas. Es decir, adoptar escalas no lineales, con escalones más amplios en la parte de las amplitudes grandes, y más cerrados en los de las más pequeñas, que son las más probables. Esto significa que en vez de hacer una asignación proporcional o lineal de niveles en función del valor de amplitud, esta asignación se realice según una ley no lineal. A este proceso se le conoce por compresión, ya que su efecto consiste en comprimir los intervalos cuánticos que corresponden a valores bajos de la amplitud de las muestras. La Figura 38 presenta la codificación lineal en comparación a la no lineal.
Figura 38. Codificación lineal vs. no lineal.
La tercera operación básica de la Modulación por Impulsos Codificados, una vez realizada la cuantificación, es la codificación. Esta etapa consiste en sustituir cada muestra por un grupo de impulsos de amplitud fija, que por la combinación de presencias o ausencias de los mismos forme una determinada palabra código (de carácter binario), que represente de modo inequívoco el valor cuantificado de dicha muestra. Se obtiene así, finalmente, una serie de impulsos de amplitud fija, es decir, cuya amplitud no contiene ninguna información, ya que esta reside en la presencia o ausencia de cada impulso. Este conjunto de impulsos se envía al medio de transmisión, como depositario, en forma codificada, de la información original.
Al finalizar la etapa de codificación, se realiza una operación complementaria que tiene por objeto alterar la polaridad de los impulsos de salida. A la salida del codificador se obtiene una serie de impulsos unipolares, es decir todos ellos con la misma polaridad. Esto presenta la desventaja de que una señal así formada contiene un gran porcentaje de su energía en componentes de baja frecuencia, cuya transmisión presenta inconvenientes. Para resolver dicha dificultad, basta someter a estos impulsos a una operación consistente en intervenir alternadamente su polaridad, de manera que dos impulsos consecutivos tengan siempre polaridad opuesta. El conjunto resultante, de naturaleza bipolar, ya no contiene esos componentes indeseables.
Ya que en un sistema PCM, a la señal analógica se le hace un muestreo a intervalos regulares (el doble de la frecuencia más alta de la señal), para el canal de voz estándar de 4 kHz se tiene: 4000 x 2, resultando en 8000 veces por segundo. Por lo tanto, se toma una muestra cada 1/8000 segundos o cada 125 microsegundos (ver Figura 39).
Fig 39. Toma de muestras cada 125 µseg.
El muestreo se realiza alimentando la señal analógica a un circuito con una puerta que sólo se abre mientras dura el impulso de muestreo. La salida es una señal de impulsos modulados en amplitud (PAM) (ver Figura 40).
Fig 40. Señal de impulsos modulados en amplitud (PAM) obtenida del muestreo de la señal original.
La gama total de amplitudes (voltajes) que la señal PAM puede ocupar se divide en niveles, a cada uno de los cuales se le asigna un número. Debido a que el empleo de decimales haría más complicado el proceso e incrementaría el ancho de banda que se requiere para la transmisión, los niveles se seleccionan únicamente con valores enteros. En el PCM recomendado internacionalmente, existen 256 niveles diferentes, ya que se ha encontrado mediante pruebas subjetivas que es el número de niveles apropiado para la adecuada comprensión de la voz.
Es conveniente aclarar que hay dos leyes diferentes de cuantificación no uniforme en uso en el mundo, llamadas ley "Mu", desarrollada y utilizada en Estados Unidos, y ley "A", desarrollada y utilizada en Europa y también en Venezuela. Estas dos leyes proporcionan diferentes valores de cuantificación para una señal de una amplitud dada, de manera que los canales PCM para dichos dos estándar no pueden trabajar conjuntamente a menos que se suministren equipos especiales de conversión para la interoperación.
La ley A para el proceso de cuantificación no uniforme, recomendada por el CCITT para los sistemas europeos, es una función logaritmica que divide la escala de cuantificación en 16 segmentos de longitudes diferentes, dividido cada uno a su vez en 16 intervalos iguales. Los cuatro segmentos centrales, que son similares entre si porque poseen la misma pendiente, a veces se les considera agrupados en un único segmento (que aparece como 7 en la figura 41), de manera que la ley A se la denomina de 13 segmentos.
Fig 41. Ley A de cuantificación no uniforme recomendada por el CCITT (UIT-T).
En el eje horizontal de la curva logarítmica, se representa la amplitud (normalizada) de la señal de entrada, mientras que en el vertical se representa el número de valores de decisión; ésto es, los intervalos de cuantificación.
La parte positiva de la curva presenta ocho segmentos de pendiente distinta, salvo los dos primeros tramos que en realidad son uno sólo. Ya que se considera que en cada segmento hay una señal escalonada de 16 niveles (intervalos) iguales (ver Figura 42), en total se tienen 128 valores de cuantificación. De igual manera, en la parte negativa se tienen otros 128 valores de cuantificación.
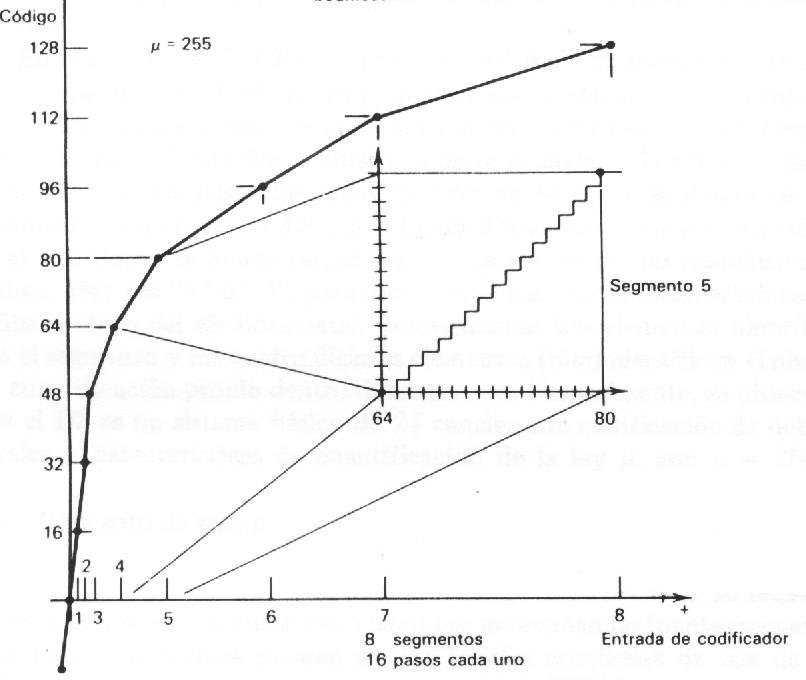
Fig 42. Señal escalonada de 16 niveles (intervalos, pasos) perteneciente al segmento 5 de la parte positiva de la curva de cuantificación.
La etapa final de la representación digital de una señal analógica, la codificación, consiste en convertir cada muestra cuantificada en una secuencia de n impulsos discretos de longitud fija denominada palabra, carácter o código. Debido a que se requiere un total de 256 niveles de cuantificación en la modulación por impulsos codificados, para representar todos estos intervalos se necesitan caracteres de 8 bits, ya que 28 = 256. Este grupo de 8 bits forma una palabra MIC (PCM), cuya estructura se muestra en la Figura 43.
Fig 43. Estructura de 8 bits de una palabra MIC.
Una palabra PCM está estructurada en tres partes denomindas P, S y N.
P, el primer bit, indica la Polaridad de la muestra, y depende de su ubicación en la curva. Será Uno (1), si la muestra está ubicada en la parte positiva de la curva (del eje horizontal hacia arriba); y Cero (0), si la muestra está ubicada en la parte negativa (por debajo del eje horizontal).
S, constituido por los siguientes tres bits, define el Segmento de la ley A en el que se sitúa la muestra. Se codifica con tres bits aunque haya 16 segmentos, porque es usual referirse a la mitad de la curva (mediante el bit de signo se indica si se está en la mitad positiva o negativa).
N, formado por los cuatro últimos bits, define el Nivel dentro de cada segmento. Como dentro de cada segmento hay 16 niveles, se codifica con cuatro bits.
La Figura 44 muestra la codificación para los 13 segmentos y la figura 45 presenta la codificación para los 16 intervalos dentro de cada segmento, especificada por el CCITT.
Fig 44. Codificación de segmentos según la ley A.
Fig 45. Codificación de niveles (intervalos, pasos) dentro de cada segmento según la ley A.
La figura 46 muestra la palabra PCM 11101000. En función de la codificación según la ley A, se puede determinar que es una muestra positiva, ya que el bit de signo es 1, dicha muestra está en el segmento 6 del cuadrante positivo (segmento 12 de la ley A), y dentro de dicho segmento se está en el nivel (intervalo, paso) 8.

Fig 46. Ejemplo de codificación de la palabra PCM 11101000.
La figura 47 presenta un resúmen del proceso PCM en donde se observan cada una de las etapas que lo componen.
Fig 47. Etapas del proceso de modulación por impulsos codificados.
Ya que la velocidad de muestreo en PCM es de 8000 veces por segundo y cada muestra está formada por 8 dígitos (bits), hay 64000 bits por segundo para un canal PCM particular. Esto quiere decir que un canal digital de 64 kbit/s de capacidad es equivalente a un canal telefónico analógico con ancho de banda de 4 kHz. Esta es la razón por la cual el canal digital básico en el estándar europeo se diseña para operar a 64 kbps.
Codificación de Línea. Las señales de modulación por codificación de impulsos que se transmiten sobre cualquier sistema digital, son una secuencia de unos y ceros (marcas y espacios). La secuencia normalmente no se envía en forma directa a la línea de transmisión, sino que primero se arregla de acuerdo con un código de línea.
Esto se debe a que si se envía hacia la línea de transmisión una secuencia larga de ceros y unos de manera consecutiva, la línea daría la impresión de estar o en estado permanentemente prendido o permanentemente apagado, transmitiendo una corriente directa hacia la línea. Esto no es recomendable porque no se puede obtener de los repetidores y decodificadores la sincronización cuando no existen transiciones; esto es, los dispositivos subsecuentes en la línea no pueden distinguir el comienzo ni el final de cada bit individual.
El problema se agrava a medida que el número de ceros y unos se incrementa. Los códigos de línea, por lo tanto, buscan asegurar que se mantenga una frecuencia mínima de cambios en el estado de la línea. Esto ayuda a la sincronía de los regeneradores intermedios y a la sincronía del receptor distante, optimizando la operación del sistema de línea.
Entre los códigos de línea recomendados por el CCITT, dos de los más comunes son el AMI (Alternate Mark Invertion - Inversión Alternada de Marca) y el HDB3 (High Density Bipolar - Binario 3 de Alta Densidad). Estos códigos normalmente son de tres estados, a diferencia de los de dos estados prendido/apagado.
En el código AMI, el "0" se codifica como ausencia de pulso y el "1" se codifica alternativamente como pulso positivo y negativo; la alternancia ocurre cada vez que se presenta un "1". Alternando la polaridad de los pulsos se ayuda a evitar que se transmita corriente directa a la línea. La figura 48 presenta esquemáticamente el principio del código AMI.
Fig. 48. Código AMI.
El código HDB3, extensamente usado en Europa y en sistemas internacionales de transmisión, es una ampliación del AMI en el que el número de ceros consecutivos que pueden enviarse a la línea se limita a tres. El "3" indica que se sustituyen las formaciones binarias que tengan más de tres ceros consecutivos.
Con el código HDB3, se evita el envío de muchos ceros seguidos enviando cada cuarto cero consecutivo un impulso como el correspondiente a los unos pero sin alternar, denominado violación (del mismo signo que el impulso anterior). El extremo receptor detecta esta violación y la considera un cero. Esto es, el cuarto "0" de la secuencia se transmite a la línea con la misma polaridad de la marca que se envió con anterioridad, lo cual constituye una "violación" al concepto AMI. La figura 49 ilustra el código de línea HDB3.
Fig 49. En HDB3, el cuarto cero en una secuencia de cuatro es marca (se forza a ser 1) pero esto se hace de tal manera que el valor cero de la señal original se puede recuperar en el extremo receptor. La recuperación se consigue marcando cada cuarto cero en violación, es decir con la misma polaridad que la marca precedente, en lugar de marca con polaridad opuesta (el procedimiento normal es polaridad opuesta de marcas consecutivas).
Multiplexión por División en el Tiempo. Mediante la aplicación de PCM puede transformarse cualquier señal analógica de manera que pueda ser aceptada y transmitida por cualquier medio de transmisión digital. Pero hay otra razón fundamental para transformar una señal, además de la de adecuarla a la naturaleza del medio transmisor. Esta razón es la de transmitir varias comunicaciones simultáneamente por el mismo canal de comunicación. Este proceso se denomina multiplexión.
Ya que entre dos impulsos consecutivos existe un determinado espacio (intervalo - slot) de tiempo, pueden ubicarse en él impulsos correspondientes al proceso de modulación de otras comunicaciones. De esa forma, el primer impulso corresponderá a la primera comunicación, el segundo a la segunda, y así sucesivamente, hasta que el enésimo más uno vuelva a corresponder a la primera, el enésimo más dos a la segunda, etc. De esta manera se obtiene el concepto básico de la multiplexión por división en el tiempo (TDM – Time Division Multiplexing) (ver figura 50).

Fig 50. Multiplexión por división en el tiempo. En el intervalo de tiempo entre dos impulsos consecutivos de una misma señal, se intercalan impulsos de otras señales.
La multiplexión por división en el tiempo constituye el procedimiento mediante el cual es posible transmitir un determinado número de canales a través de un circuito común, asignando éste a cada canal en forma sucesiva durante un período de tiempo dado; ésto es, en un instante determinado, sólo un canal se encuentra conectado al circuito común.
La figura 51 muestra la transmisión intercalada de impulsos (bits) pertenecientes a los canales 1, 2, 3 y 4 a través del circuito común, luego de ser multiplexados.
Fig 51. Multiplexión por división en el tiempo. En un instante determinado, sólo un canal (1, 2, 3 o 4) se encuentra conectado al circuito común.
Ya que se pueden codificar las muestras de cada canal antes de la multiplexión con codificadores individuales por cada canal, y también la etapa de codificación puede efectuarse después de la multiplexión de las muestras, la multiplexión por división en el tiempo se puede llevar a cabo mediante la intercalación de bits individuales o intercalando un byte (8 bits) a la vez de cada uno de los canales tributarios. Esto tiene la ventaja de permitir mayor flexibilidad en la constitución de la señal digital.
Como la transmisión digital está basada en impulsos discretos y no en señales continuas, es posible transmitir sobre la misma trayectoria la información de más de un canal de 64 kbps, siempre que la tasa de transmisión (la tasa de bits) sea lo suficientemente alta para transportar los bits procedentes de varios canales. En la práctica esto se puede efectuar intercalando los impulsos de los diferentes canales de entrada de tal manera que una secuencia de 8 impulsos (un byte u octeto) procedente del primer canal sea seguida de la secuencia de 8 impulsos que procede del segundo canal y así sucesivamente. Este principio se ilustra en la figura 52.
Fig 52. Intercalado de palabras (bytes) PCM de distintas señales de voz.
En esta figura, el equipo TDM (multiplexor) se podría considerar como un interruptor giratorio que capta por vez 8 bits (o 1 byte) de cada uno de los canales de entrada A, B y C. De esta manera, el tren de bits de salida del equipo TDM comprenderá el byte A1 (del canal A), el byte B1 (del canal B), el byte C1 (del canal C); después, reiniciando el ciclo, el byte A2, byte B2, byte C2, y así sucesivamente.
Debe notarse que se necesita una tasa de bits más elevada en la salida, para asegurar que todos los datos de entrada procedentes de los tres canales se puedan enviar hacia la línea. Como 3 x 2 = 6 bytes de datos se reciben en el lado de entrada en el período de 250 microsegundos (1 byte de cada canal cada 125 µs), todos ellos tienen que ser transmitidos sobre el circuito de salida en una misma cantidad de tiempo. Ya que solamente se emplea un solo canal como salida, esto implica la tasa de 6 x 8 = 48 bits en 250 us; es decir, 192 kbps (3 x 64 kbps). Así, de hecho, los diferentes canales comparten en tiempo la trayectoria de salida de transmisión.
Por razones de flexibilidad, economía y eficacia, el proceso de multiplexión por división en el tiempo se realiza escalonadamente. En una primera etapa, se forma un conjunto con un determinado número de comunicaciones. Si este número es suficiente para cubrir la capacidad deseada, el proceso ha terminado, y la señal digital compuesta por los impulsos combinados resultantes de todas esas comunicaciones puede entregarse al equipo de línea (uno de los dos componentes de los sistemas de transmisión, junto con el multiplexor) para su transmisión. Si, por el contrario, se requiere una capacidad mayor, se realiza un nuevo proceso de multiplexión, sólo que ahora, en lugar de multiplexar las señales analógicas correspondientes a comunicaciones simples, se multiplexan los conjuntos de impulsos obtenidos en la etapa anterior. Procediendo sucesivamente así, pueden irse obteniendo señales digitales complejas que contengan la información de un número creciente de comunicaciones.
La ley de formación de los sucesivos órdenes de multiplexión responde a normalizaciones de carácter internacional a fin de facilitar las conexiones entre diversos países y la compatibilidad entre equipos procedentes de distintos fabricantes. El CCITT recomienda, como número de canales a multiplexar para el primer orden de la jerarquía, 24 o 30. El sistema de 24 canales fue el elegido por la ATT (American Telephone and Telegraph, empresa norteamericana de explotación telefónica), y se utiliza en Estados Unidos y Japón. El sistema de 30 canales se usa en Europa y en la mayoría de los países latinoamericanos, incluido Venezuela.
Ambos sistemas emplean, como frecuencia de muestreo, la de 8 kilohertz (doble del ancho de banda del canal telefónico), haciéndose, por tanto, un muestreo de cada comunicación cada 125 microsegundos (1/8000 seg.). Como cada 125 microsegundos se toma una muestra y se genera una palabra PCM de 8 bits para un canal telefónico particular (ya que la velocidad de muestreo es de 8.000 veces por segundo), esta palabra PCM completa puede generarse y transmitirse tan rápidamente que cualquier vía de transmisión alimentada por un sólo canal PCM permanecería inactiva la mayor parte del tiempo. Mediante la utilización de dispositivos interruptores de exploración de alta velocidad (multiplexores), se intercalan palabras PCM de otros canales, con el fin de llenar el tiempo inactivo mencionado
En la multiplexión de primer nivel (de los tributarios PCM), se hace un muestreo de las fuentes de información (canales de voz de 4 kHz) secuencialmente. El resultado final del muestreo y de la cuantificación y codificación subsecuentes es una serie de impulsos, una corriente de bits en serie ("1" y "0") en la que se requiere alguna indicación o identificación del inicio de la secuencia de exploración. Dicha identificación, conocida como alineación, es necesaria en el receptor del extremo distante para que se pueda saber con exactitud dónde empieza y termina cada secuencia. Cada secuencia o ciclo de muestras completo es lo que se conoce como Trama en la terminología PCM. Para cada canal se define un segmento de tiempo que se repite cada 125 microsegundos. En este intervalo de tiempo, la trama, se introducen las muestras de las demás comunicaciones (canales de voz).
En el sistema europeo, la trama se divide en 32 intervalos (ranuras o slots) de tiempo de 3,9 microsegundos cada uno (ranuras 0-31), de los que 30 contienen los impulsos codificados de las muestras correspondientes a otros tantos canales telefónicos (ranuras 1-15 y 17-31) , y los dos restantes contienen impulsos de sincronismo (alineación de trama, ranura 0) y señalización (ranura 16) (ver figura 53).
Fig 53. Trama digital en la multiplexación de primer nivel (2 Mbps) en el sistema europeo.
Como cada muestra se representa mediante ocho impulsos en forma codificada binaria (por ausencia o presencia de ellos), la velocidad de transmisión; esto es, el número de impulsos por unidad de tiempo de la señal digital compuesta, a la salida de la primera etapa del proceso de multiplexión, es de 2048 kilobits por segundo en el sistema europeo (32 x 64 kbps).
En el sistema americano, la trama se divide en 24 intervalos de tiempo, cada uno de 5,18 microsegundos, correspondientes a otros tantos canales telefónicos junto con su señalización, y otro intervalo de 0,65 microsegundos para sincronización. Como se usa un código de siete niveles (es decir, 27 = 128 pasos de cuantificación) y a cada grupo de 7 bits que representa la codificación de un paso de cuantificación se le añade 1 bit para señalización y a la secuencia completa se le añade 1 bit para alineación, se tiene: [(7+1) x 24] + 1 = 193 bits x 8000 = 1554 kbps, la cual es la velocidad de la primera etapa de multiplexión en el sistema americano.
En un sistema de transmisión digital pueden distinguirse siempre dos partes diferentes: el equipo multiplexor, encargado de formar el paquete que contenga la combinación de las señales correspondientes a un determinado número de comunicaciones, y el equipo de línea, que transporta ese paquete o señal compleja de un punto a otro para ser demodulado en el equipo multiplexor distante, a fin de individualizar así las comunicaciones originales.
Una vez que el equipo multiplexor termina sus operaciones de multiplexión, se obtiene una señal digital compuesta, combinación de todos los impulsos correspondientes a los distintos canales telefónicos, más los de alineación y sincronismo. Esta señal tendrá una velocidad mayor o menor según las etapas de multiplexión que se hayan llevado a cabo. En todo caso, apartando la velocidad, su naturaleza es siempre la misma: un conjunto de impulsos de amplitud constante.
El empleo de la técnica TDM es tan común en los sistemas digitales de línea, que los circuitos físicos que transportan solamente 64 kbps son muy raros, de modo que el equipo terminal digital de línea incluye la función de multiplexión. La figura 54 muestra el equipo terminal digital de línea típico que se emplea para convertir cierto número de canales analógicos individuales en un tren digital de bits único transportado sobre un circuito físico único.
Fig 54. Multiplexor primario en la jerarquía europea.
El equipo que se muestra se conoce como multiplexor primario y contiene equipo para la conversión individual analógico a digital de canales telefónicos de 64 kbps y, además, el equipo para la multiplexión por distribución del tiempo. En la figura se ilustra el multiplexor primario europeo que convierte 30 canales analógicos al formato digital con código de ley A de 64 kbps y luego multiplexa por distribución de tiempo todos estos canales de 64 kbps en un sistema digital de línea único de 2.048 Mbps (32 x 64 kbps).
Como se mencionó previamente, los canales 0 y 16 del sistema europeo generalmente se emplean para propósitos distintos al de transportar información de voz. El canal 0 porta la alineación de trama y sincronía, suministrando una marca clara para indicar el comienzo de cada trama; esto es, proporciona la señal para la formación de lastramas. El canal 16, por su parte, se reserva para transportar la información de señalización que se necesita para establecer las llamadas en los 30 canales de usuario. La función de este canal es enviar el destino deseado de la llamada sobre él entre una central y la siguiente.
El otro componente del transmisor, el equipo de línea, es el encargado de recoger la señal, transportarla hasta el punto de destino y entregarla allí, en buenas condiciones, al equipo multiplexor receptor, para su demultiplexión, y consta de dos elementos principales: los repetidores y el portador. Por este último circula la señal digital a lo largo de la trayectoria deseada, y dado que durante el camino dicha señal se irá debilitando, será preciso intercalar periódicamente repetidores que compensen tal debilitamiento.
Si la señal fuese analógica, la acción de dichos elementos repetidores se reduciría a amplificarla, aumentando su potencia. Esto tendría el efecto de que todas las imperfecciones que la señal llevara asociadas al llegar al repetidor (ruido, distorsiones, etc.), serían también amplificadas junto con la señal y, por tanto, serían acumulativas. Sin embargo, en una señal digital, la información no reside en la amplitud o forma de los impulsos, sino en la presencia o ausencia de éstos. Por lo tanto, por muy imperfectos que éstos lleguen al repetidor, con tal de que aún sea identificable su presencia, es suficiente. El repetidor entonces, al constatar la llegada de un impulso, genera otro nuevo, y lo transmite. Es decir, vuelve a generar realmente la señal original; es como si el transmisor se hubiese trasladado a ese punto, y las perturbaciones que pudieran acompañar a la señal desaparecen. Por esta razón, se denomina Regeneradores a los repetidores PCM.
La función de un regenerador es comprobar el tren de impulsos entrante, a intervalos muy bien temporizados, para verificar la presencia o ausencia de un impulso. Cada vez que se detecta un impulso, se transmite a la línea uno nuevo no distorsionado, no realizándose dicha transmisión en caso contrario. La figura 55 presenta un esquema por bloques simplificado de un regenerador de impulsos.
Fig 55. Regenerador de Impulsos. Inicialmente la corriente entrante de bits se ecualiza, amplificándose seguidamente para reducir los efectos de la atenuación de la línea y de la distorsión. La señal amplificada se aplica a un circuito temporizador que genera los impulsos de temporización exigidos. Siempre que un impulso de temporización y un pico, positivo o negativo, de la onda de señal entrante coincidan en el tiempo, se genera un impulso de salida en el generador de impulsos adecuado (+ o -). Está establecido que no se producirá un impulso de salida, a menos que el voltaje de pico de la señal sea mayor que un cierto valor predeterminado, con objeto de impedir actuaciones falsas debidas a picos de ruido.
El conjunto de regeneradores distribuidos a lo largo de la trayectoria de transmisión, se completa con los regeneradores terminales, uno en cada extremo, los cuales son equipos más complejos asociados con los equipos multiplexores y que, además de dicha función de regeneración, efectúan algunas operaciones complementarias, aunque no menos importantes, como son la de suministrar la alimentación a los regeneradores intermedios (telealimentación) y proporcionar un sistema de telecontrol que permita detectar averías en esos regeneradores y su localización.
La figura 56 ilustra los componentes principales de un sistema de transmisión digital primario (de 2 Mbps).
Fig 56. Sistema de transmisión digital primario. Se distinguen sus componentes principales: los multiplexores de 30 canales (PCMx30: A y B), los equipos terminales de línea (LTR) y los regeneradores de línea (LR).
Cualquier sistema de multiplexión por distribución en el tiempo, requiere un procedimiento que garantice que el transmisor de un extremo y el receptor del otro trabajen en forma sincronizada. Con tal propósito, se inserta en cada trama, de forma periódica (de período igual al de la trama o múltiplo de éste), un intervalo de tiempo que contenga una palabra código característica que permita identificar cada canal. En el sistema europeo se utilizan ocho bits que se transmiten en una trama sí y en otra no, con una frecuencia de repetición de 4 kilohertz. Además, para sincronizar la señalización telefónica de cada canal, se insertan cuatro bits cada 16 tramas, con una frecuencia de repetición de 500 Hz.
Si dos canales de un sistema TDM que comparten un circuito común, se encuentran conectados a éste por medio de una puerta de canal; esto es, un conmutador electrónico que sólo permite el paso de la señal presente en un canal cuando se abre por medio de un impulso que las controla, al aplicar el impulso de control a la puerta 1 en el instante t1 y no a la puerta 2, aquella se abrirá durante un tiempo igual a la duración del impulso, mientras que la segunda permanecerá cerrada. Por lo tanto, durante este tiempo, se transmitirá a la línea un impulso o muestra de la amplitud de la onda de la señal presente en el canal 1. Al final del impulso, se cierran ambas puertas, no transmitiéndose ninguna señal a la línea.
Si se aplica el impulso de control a la puerta 2, en el instante t2 posterior, se abrirá la puerta 2, transmitiéndose una muestra de la onda de la señal presente en el canal 2. Así, cuando los impulsos aplicados para controlar la apertura y cierre de las puertas 1 y 2 se repiten a intervalos regulares, se transmite una serie de muestras de las ondas de señal presentes en los dos canales.
En el extremo receptor del sistema, se abren las puertas 1 y 2 por medio de la aplicación de impulsos de control en aquellos instantes en que se están recibiendo las muestras de las ondas correspondientes a su canal. Esta condición exige una sincronización adecuada entre los impulsos de control aplicados a las puertas 1, así como entre los aplicados a las puertas 2.
Si el tiempo invertido por las señales en recorrer el circuito común fuera nulo, el sistema exigiría que los impulsos de control en ambos extremos se encontraran en exacto sincronismo. Sin embargo, ya que en la práctica, el tiempo de transmisión no es nulo, los impulsos de control que se aplican en el extremo receptor del sistema deben tener lugar ligeramente después que los correspondientes del extremo emisor. Por lo tanto, aunque las fuentes originales sean síncronas, las señales no lo son del todo a causa de los retrasos causados por la transmisión, por lo que deben considerarse como plesiócronas (casi síncronas).
Sin embargo, si las señales de sincronización se envían de uno a otro extremo como una parte integral de un sistema PCM, como se hace en los sistemas especificados internacionalmente, todas las señales mantendrán sus posiciones relativas correctas. Si el impulso de sincronización es correcto, las muestras de onda se dirigen a los canales adecuados del extremo receptor y las muestras recibidas podrán convertirse entonces en la onda original, es decir, demodularse.
El procedimiento para multiplexar las señales plesiócronas consiste en crear una trama formada por el entrelazado de los bits de cada canal, más una información auxiliar de relleno, conocida como justificación, que permita sincronizarlos. En el receptor, la demultiplexación se realiza con ayuda de una palabra código de sincronismo como en las etapas primarias, restituyendo las señales originales y suprimiendo la justificación introducida.
En la etapa primaria que se ha descrito hasta ahora, los equipos multiplexores convierten, incluyendo un proceso PCM, varias señales analógicas en una señal digital y viceversa. Sin embargo, en las etapas sucesivas de multiplexación, los multiplexores ya no recogen señales analógicas, sino que combinan varias señales digitales, provenientes de la etapa anterior, mediante multiplexión por división en el tiempo, en una única señal digital de mayor velocidad. En estas etapas sucesivas de multiplexión, el proceso se lleva a cabo mediante entrelazado de los impulsos. Esto significa que las diversas señales digitales originales (señales tributarias), se combinan bit a bit. Esta solución es más eficaz que el entrelazado de intervalos de tiempo entre sí, que precisaría de un almacenamiento previo de las señales.
La organización de los distintos niveles jerárquicos de multiplexión digital toma, como punto inicial de partida en el sistema europeo, la velocidad de la etapa primaria (32 x 64 kbps = 2.048 kbps). Para definir las velocidades de las diversas etapas subsiguientes, la jerarquía PCM europea se basa en el primario de 2.048 kbps (30 canales de información más el canal "0" de sincronía y el "16 de señalización"), y parte de un criterio de uniformidad en cuanto al factor multiplicador del número de canales de un orden al del siguiente, que siempre es cuatro. En consecuencia, existen los cuatro órdenes jerárquicos normalizados siguientes:
La figura 57 ilustra la jerarquía europea de multiplexación utilizada en Venezuela.
Fig 57. Jerarquía europea de multiplexación utilizada en Venezuela.