|
|
|
|
|
|

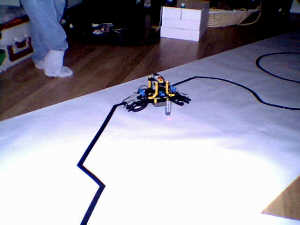
Meet The CAN GRABBER. Its mission is to find cans colect and deposit them at the base. It has 3 motors, 2 rotation sensors and 1 light sensor. A rubber band keeps the grabber closed until is lowered on some cams that makes it open. It uses the RCX and the light sensor for IR proximity. The program is written in LeJOS and it uses the Rotation Navigator to remember where the base is.
Faceti cunostinta cu CAN
GRABBER. Misiunea lui este de a cauta
cutii de Pepsi, de a le culege si de a le depozita la baza. Are 3 motoare,
2 senzori de rotatie si un senzor de lumina. Un elastic tine clestele deschis
pana cand este coborat peste un sistem de came care il fac sa se deschida.
Foloseste RCX-ul si senzorul de lumina pentru proximitate in infrarosii.
Programul e scris in LeJOS (limbaj Java pt Lego) si foloseste Navigatorul
de Rotatie ca sa tina minte unde se afla baza.

Starts in a corner... Porneste dintr-un colt... |

Goes to the midle of the room... Merge pana in mijlocul camerei... |

Slowly turns scaning for cans... Se roteste incet, scanand... |

It stops. Maybe it found something... Se opreste. Poate a gasit ceva... |

Turns back until the can is in the center... Se intoarce pana cutia se afla in centru... |

Lowers the arm... Coboara bratul... |

Goes forward until it touches the can... Merge inainte pana atinge cutia... |

Lifts the arm grabbing the can... Ridica bratul prinzand cutia... |

Sets the can in the basket... Aseaza cutia in cos... |

Turns back to the start point... Se intoarce la punctul de start... |

Unloads the can... Descarca cutia... |

Goes a little back and turns around ready to start again. Merge putin in spate apoi se intoarce gata sa porneasca din nou. |
 |
 |
 |
This is my version of R2D2. It has 3 motors, 1 touch sensor and 1 light sensor. It has an arm wich design I found in Mario Ferrari's book. You can see it in the pictures holding a screwdriver.
Aceasta este versiunea mea de robot stil R2D2.
Are 3 motoare, 1 sensor de contact si 1 sensor de lumina. Are un brat al
carui design l-am gasit in cartea lui Mario Ferrari. Puteti vedea cum tine
o surubelnita.
 |
 |
 |
Here you can see some pictures I took at my first Lego robots competition. My robot is Tilt-a-Wheel, a canted wheels architecture wich I've previously built for fun and I just had to add the light sensor and a touch sensor to help at initialisation. Unfortunately I wasn't able to finish my program in time and I had to use a standard program, with wich my robot didn't perform properly. Anyway it was fun to see it in action and it won "Peoples Choice" award.
Aici puteti vedea cateva poze pe care le-am facut
la primul meu concurs de roboti Lego. Robotul meu e Tilt-a-wheel,
cu o arhitectura cu roti inclinate spre interior pe care l-am construit
mai demult ca distractie si la care a trebuit doar sa adaug sensorul de
lumina si un sensor de contact pentru initializare. din pacate nu am reusit
sa-mi termin la timp programul si a trebuit sa folosesc un program standard
cu care robotul meu nu a functionat bine. A fost totusi interesant de privit
in actiune si a castigat premiul special de favorit al publicului.

Lineup |

Dragster |

Stretch |

Spybot |

Jona's bot |

? bot |

Kokomo Joe |

Ben Hur |
Tilt-a-Wheel |

Tilt-a-Wheel |

"Peolpes Choice" - Tilt-a-wheel - Gabriel Petrut |

"Winner" - Ben Hur - Steve Hassenplug |