












A Tour of the Old Dominion University Maglev with Professor Thomas E. Alberts, Ph.D.
(Click on images to enlarge. All links open in a new window.)
|
On February 5, 2006, Professor Thomas Alberts of Old Dominion University provided members of the Yahoo Urban Maglev forum a tour of the ODU maglev system. The maglev system was built by American Maglev Technology to demonstrate their low-speed urban transit maglev system. Due to a shortage of funds and technical problems with the levitation system, the system never became operational. |
|
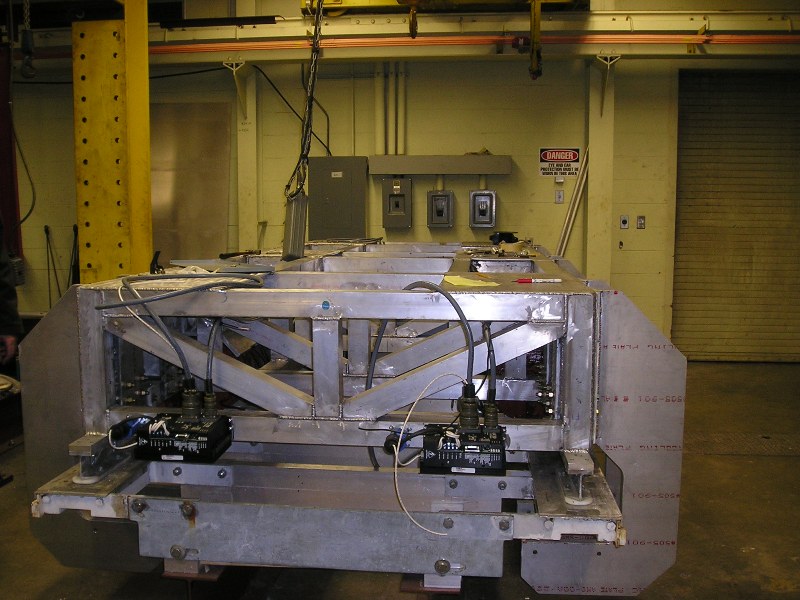
American Maglev Technology is no longer directly involved with the ODU maglev project. Professor Alberts has put together a lab to evaluate and redesign the levitation system. Here, Professor Alberts is describing the setup for testing the control system. |
|
The test fixture features electromagnets that pull downward on one end of a lever system that has a counterweight at the opposite end. Inputs to the control system are an eddy current transducer that measures the gap distance and an accelerometer that is integrated once to determine the velocity. |
|
The orange part that Professor Alberts is touching with his left hand is a levitation magnet. |
|
The cylindrical device at the tip of Professor Albert's right hand is a load cell. |
|
Here is the counterweight. |
|
Professor Alberts has energized the system and the counterweight has lifted off the stops. Stable levitation has been achieved with a gap of approximately 1/2" at the levitation magnets. |
|
Development work is underway on a small test vehicle to validate the control system. American Maglev Technology's control system utilized optical measurements of the levitation gaps to determine the overall heave, roll, and pitch condition of the vehicle. The fundamental problem was that the controller design did not account for the flexibility of the vehicle and guideway. American Maglev Technology and their technical partner, Lockheed, did attempt to address this once they determined that it was a problem; however, they did not succeed. Professor Alberts intends to implement a simplified control approach, similar to the method successfully used by the HSST system. He believes this will solve the stability problem. The small test vehicle will utilize gap and flux measurements at each levitation magnet. There will be six levitation magnets, each with its own sensors. |
|
The small test vehicle has been outfitted with linear induction motor propulsion magnets but levitation magnets have not yet been installed. The black boxes at the ends are high speed switches for controlling the power input to the levitation magnets. The ratio of time that the switches are on and off is varied to adjust the power input. The system is relatively compact and inexpensive; however, it does generate a lot of electro-magnetic noise. |
|
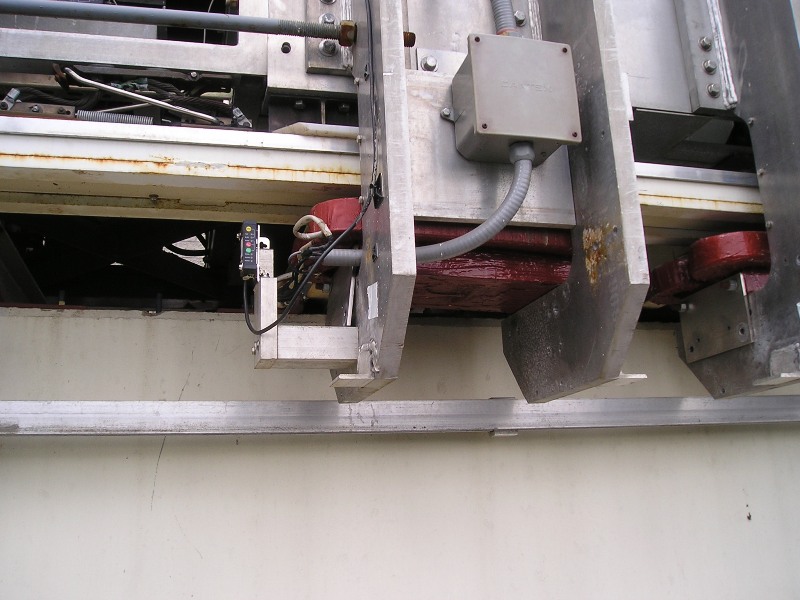
Here is the actual vehicle on the guideway with the levitation magnets and linear induction motor exposed. The vehicle has no secondary suspension system between the levitation magnets and vehicle body. Mounting the levitation magnets to short stiff bogies with a secondary passive suspension system (springs) between the bogies and the body might have improved the effectiveness of the control system. A bus bar can be seen alongside the guideway. The bus bar provides power to the vehicle via contact shoes. |
|
Access to the vehicle is presently via a scissors lift. There is a proposal to convert one of the half-completed stations into a base of operations that will provide easy access to the vehicle. There is no emergency walkway alongside the guideway. The preliminary plan for emergency evacuation of the train is to use a stairway truck similar to those used at smaller airports to provide access to large passenger jets. |
|
"Don't drop the camera!" |
|
The orange levitation magnets are visible here. There are three magnets at each corner. The small black gizmo is an optical sensor for measuring the levitation gap. The optical sensors are not favored because they are prone to malfunctioning during incelement weather. |
|
The orange linear induction motor is visible in this picture. |
|
Though American Maglev Technology failed to complete the system, Professor Alberts had some kind words for their work. Tony Morris, the president of American Maglev Technology, underestimated the cost and time requried to develop the system; however, the project would never have gotten off the ground had it not been for his powers of persuasion. The American Maglev Technology engineers did some good work. It is unfortunate that vehicle and guideway flexiblity adversely impacted the effectiveness of their control system. American Maglev Technology's "Smart Vehicle, Dumb Guideway" concept with all the electronics on the vehicle is an innovative way to lower the cost of maglev technology. |
For more information on the Old Dominion University maglev, visit the following links:
Old Dominion University Maglev Website
Old Dominion University August 2006 Update
American Maglev Technology's Website
For information on other maglev systems, visit the following links:
Japanese Railway Technical Research Institute Maglev Website
Official Disclaimer: This webpage is not affiliated with Dr. Thomas E. Alberts, Old Dominion University, American Maglev Technology, the Yahoo Urban Maglev Forum, or any manufacturer of maglev systems.
Complaints Department (E-Mail Greg Vassilakos):
Greg_Christine@hotmail.com