In order to accomplish a mission, an Aurora crew has several
sensors that provide an enhanced view on the outside world. The sensors are manipulated
by the Airborne Electronic Sensor Operators (AESOp) and the Acoustic Sensor Operators
(ASO).
Acoustic Sensors
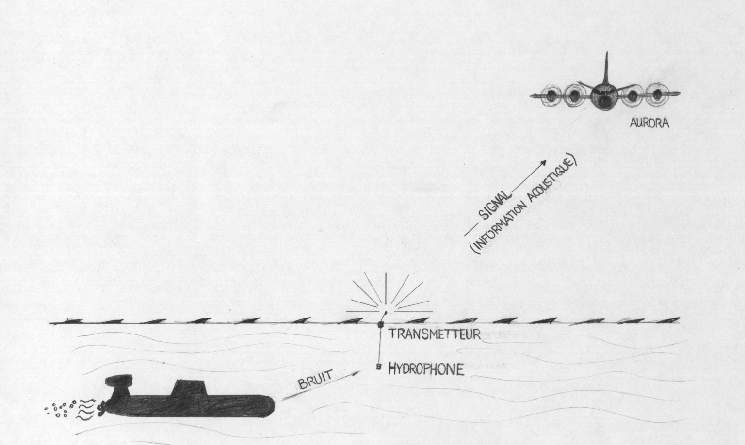
The acoustic sensors are utilized to detect submarines. There are two main components
to the acoustic equipment: the sonobuoys and the combination of the receiver,
processor and operator. A sonobuoy is a hydraphone (under water microphone) that
lies in the water and capts the ambient sounds coming from all sources in the
ocean. The hydraphone is attached at the end of a long wire, which in turn is
connected to a transmitter that transmits the signals to the aircraft (see Figure
1). There are many types of sonobuoys, and they can be classified into two general
types: active and passive. Active sonobuoys perform in a way similar to a radar:
a sound wave is transmitted from the sonobuoy, and the wave bounces on objects
and comes back to the sonobuoy. The distance and direction to the object can be
determined from the "bounce" information. Passive sonobuoys do not emit any sound,
but rather just sit in place and listen out for sounds coming from submarines
and ships. In the aircraft, a receiver capts the signals from the sonobuoys and
routs them to a processor. The processor filters out unwanted sounds, and outputs
a display of the sounds in the ocean under the form of frequency lines for passive
sonobuoys, and distance/bearing in the case of active sonobuoys. The acoustic
operator then analyses the displayed data and tries to determine its source (ship,
submarine, etc).
Figure 1. Acoustic data gathering
Radar
The radar is operated by one of the AESOps. It is utilized to detect and locate
ships and submarines on the surface of the ocean, to detect other aircraft in
the area, to localize bad weather, and to ensure collision avoidance with any
object that could lay in the Aurora's flight path.
Electronic Support Measures (ESM)
The "ESM kit" is operated by one of the AESOps. Its function is to detect electronic
emissions coming from other vessels and aircraft in the area.
Magnetic Anomaly Detector (MAD)
The MAD is operated by one of the AESOps. The function of the MAD is to localize
submarines that are under water. The MAD detects the disturbance in the Earth's
magnetic field that is created by the presence of a large metallic mass (such
as a submarine).
Forward Looking Infra-Red (FLIR)
The FLIR is operated by one of the AESOps or by the Navigator Communicator. The
FLIR is an Infra-Red camera that outputs a heat-based image of a contact for identification
purposes.
Other Equipment
The Aurora crews have at their disposition several radios including HF, UHF, VHF-AM,
VHF-FM, and LFDF radios, some of them with encryption capability. Another capability
is the data link, which is an electronic information network that links together
all link-capable allied forces. The data link is used to share tactical information
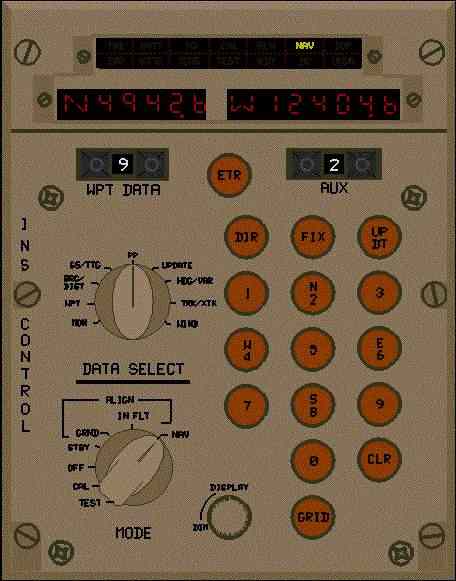
among the force. The navigation equipment includes two inertial navigation systems,
an omega navigation system, and various navigation aids such as doppler, tacan
and others.
Figure 2. Inertial Navigation System Control Panel