The Walking Robot Project
Theory of opperation:
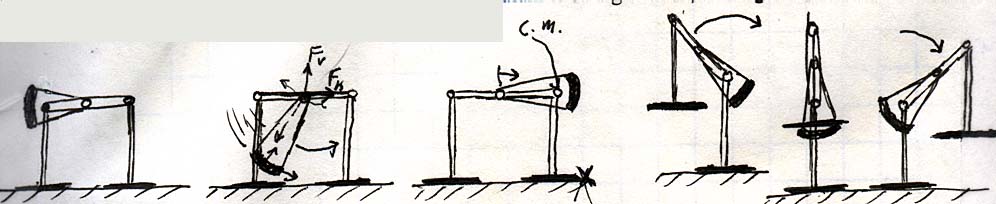
The theory of operation for this robot is an unconventional method developed solely by myself in 1995. The robot will shift its center of mass from a location above one set of legs, to another by swinging a pendulum. This pendulum will consist of a heavy weight which, upon reaching the end of its swing, locks and will be in balance with the rest of the robot (the fulcrum being located at the hip joint that it is closest to). When this occurs, the old set of legs will be able to freely rotate over top of the new, weight-bearing pair of legs (with little energy input besides the torque required to accelerate the rotational moment of inertia). When the old pair of legs have finished rotating over, they will come down on the opposite side of the robot. The pendulum is now in a similar position as it was before and swings again, shifting the weight of the robot to be above the other pair of legs. This cycle is continued onward and can create a forward or backward motion.