``Robotics is the science of welding intelligence to energy - i.e. intelligent control of perceptually coordinated motion.''
- reported in : Proc IEEE, Jan 1983
This thesis comprises of two main topics - Vision based obstacle detection using spectral pattern matching, and the implementation of a platform for the vision system.
There are several key driving forces behind the design used in this thesis. Cost being the most important. Even a basic vision system is a relatively expensive exercise to construct, and so is the robotic platform. This thesis shows that a practical system can be built with today's technology for a fraction of the cost of what similar, although more complicated, systems have cost in the past.
Another important driving force is simplicity. Robot vision systems are, by their nature, relatively complicated, since extracting information from an unpredictable image can be a very complex task. This thesis attempts to extract the most useful information (in the context of obstacle detection) with as little processing as possible, in order to achieve real-time or near real-time performance.
The third driving force is the use of modular components (both hardware and software) to allow for future upgrades and easy modification, as this is a research project.
When first considering a vision system, one tries to design a general system which may be useful for any application, even navigation. It, however, quickly becomes apparent that there is no such thing as a general purpose vision system.
A vision system must be considered in the context of its application. Taking into consideration the constraints of the entire system, one can optimise the vision system for that particular task. The context that is considered here is obstacle detection for the purpose of navigation. One does not care what the obstacle is, rather, one cares where it is. This means that one does not need to identify the obstacle one is avoiding. This significantly reduces the complexity of the task. \index{navigation}
The technique of image spectrum pattern matching is developed in this thesis, with the aim of providing real-time obstacle detection system for a robot.
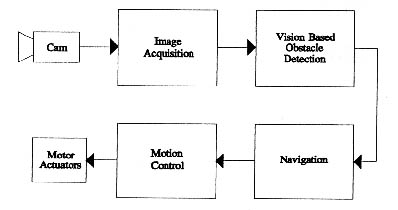
The design and construction of the platform and vision hardware is the other main topic of the thesis. A platform was built for the purpose of testing the vision system in the real world, as simulations cannot provide an adequate testing environment. The platform was also constructed to gain an understanding of how motion control and vision based navigation can be integrated.
The system software consists of several main programs; The operating system, digitisation & capture, image pre-processing & vision, navigation and control. No details of the operating system will be discussed in this thesis as they are not of central concern.
The thesis is broken up into three main parts. The first part is concerned with the theoretical design of the vision system and navigation, the second part deals with the implementation of the platform hardware and system software structure, and the third part deals with tests and performance evaluation. The appendices include source codes for the implemented robot, as well as the design of a controller for the platform. An appendix is also included that describes the design of another controller for the platform, which would improve the performance of the system.