 I have already been laughed at for this concept so it's alright if you criticize me constructively. In fact that is the only reason I'm posting my ideas.
Gimpy has a very large tail , about 3x the bopdy length with a flail at the end, it it his primary weapon.
The coordination needed to walk between all the motors and the tail is controlled by and OOPIC (object oriented Programmable Integrated Circuit) I need the object oriented so i can call objects such as right leg forward and walk forward and get up, etc.
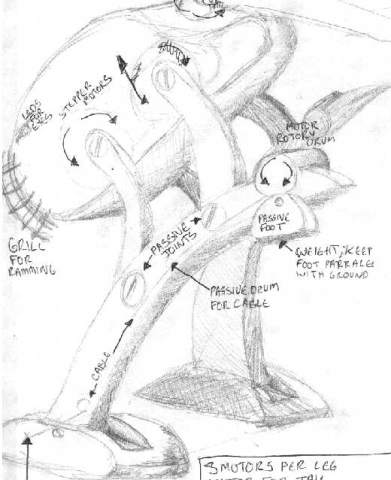
The motors I'm using are fairly large they are out of laser printers... stepper motors, 4 phase, I hope they are strong enough, they are about 4" in diameter and 6" long.
The body is a mofdified ammo can. If you don't know what one looks like it's very heavy duty, green metal box. It should take a lot of abuse and be easy to mount things in and on.
The grill in the front is to ram. Not ramming from speed but from thursting the body forward and using the weight to cause damage.
The passive feet on the back of the legs is for stability when it squats down..the DC motor behind it is soley responsible for standing.
the eyes are merely for coolness, LED's. I plan on coding in some troubleshooting using the LED's.
Something I don't have drawn here are long fat spikes on various points of the body to keep from tipping in ways that would render gimpy into a quadropolegic.
Please do give me your comments... I have already been laughed at for this concept so it's alright if you criticize me constructively. In fact that is the only reason I'm posting my ideas.
Gimpy has a very large tail , about 3x the bopdy length with a flail at the end, it it his primary weapon.
The coordination needed to walk between all the motors and the tail is controlled by and OOPIC (object oriented Programmable Integrated Circuit) I need the object oriented so i can call objects such as right leg forward and walk forward and get up, etc.
The motors I'm using are fairly large they are out of laser printers... stepper motors, 4 phase, I hope they are strong enough, they are about 4" in diameter and 6" long.
The body is a mofdified ammo can. If you don't know what one looks like it's very heavy duty, green metal box. It should take a lot of abuse and be easy to mount things in and on.
The grill in the front is to ram. Not ramming from speed but from thursting the body forward and using the weight to cause damage.
The passive feet on the back of the legs is for stability when it squats down..the DC motor behind it is soley responsible for standing.
the eyes are merely for coolness, LED's. I plan on coding in some troubleshooting using the LED's.
Something I don't have drawn here are long fat spikes on various points of the body to keep from tipping in ways that would render gimpy into a quadropolegic.
Please do give me your comments...
|