Initial Setup
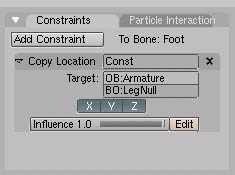
1) Create a 3-bone chain: an upper leg bone from hip to knee, a lower leg bone from knee to ankle, and a small bone extending from ankle to just below the ankle. Call them ōLegHiö, ōLegLoö, and ōLegNullö.
2) Snap your cursor to the ankle bone and create another 3-bone chain: a foot bone from the ankle to the ball of the foot, a toe bone from the ball to the end of the toes, and a bone that cuts back from the end of the toes and ends about where the ball of the foot is. The last bone will overlap or nearly overlap the one before it. Call them ōFootö, ōToesö, and ōToesNullö, respectively.
3) Snap your cursor to the ankle and create a protruding bone. Call it ōIK_ankleö.
4) Snap your cursor to the end of the toes and create a bone that extends to the base of the heel. Call it ōIK_footö.