![]() Projets
Universitaires
Projets
Universitaires![]()
bacc en génie informatique
![]()
| Durant mon bacc en génie informatique, j'ai réalisé divers projets, pour la plupart en équipe. Voici une description de ces principaux projets, particulièrement dans le cadre des cours de design. Cela permet donc d'avoir un aperçu de mes réalisations. |
|
|
|
6 projets |
![]()
| Système d'assistance à la navigation en réalité augmentée (hiver 2004) | |
Ce projet a été réalisé dans le cadre du cours de design IV, qui est l'équivalent d'un projet de fin de bacc. Il a été réalisé en équipe de 2 personnes, c'est à dire moi et mon coéquipier Jean-François Lalonde. Ce projet a été réalisé en collaboration avec le RDDC-Valcartier, le centre de Recherche et dévellopement pour la défense Canada et s'inscrit dans le secteur du commandement et contrôle lors de guerre urbaine. Il vise à identifer les concepts d'importance relatifs à la conception d'un système d'aide à la navigation en réalitée augmentée dans un véhicule. Afin de répondre à cet objectif, un état de l'art présente deux technologies existantes, soit les affcheurs tête-haute ("head-up display") et les afficheurs faciaux ("head-mounted display"). Malgré une technologie encore non-disponible sur le marché, il est déterminé que la première option semble être celle pouvant s'appliquer le mieux aux véhicules. Les critères de durabilité, de taille de surface de projection et de luminosité sont à considérer. Par la suite, un prototype de test est développé. Cet outil est une simplification en deux aspects du problème original : les acquisitions sont effectuées en temps différé et le projecteur nécessaire est remplacé par une caméra. Tout d'abord, il est alimenté par des données provenant d'un modèle virtuel. Cette simulation suppose que les données sont non-bruitées et sont reçues en totalité et en intégrité. Elle permet d'établir certains principes importants relatifs à la présentation de l'information, notamment la quantité, la clarté, la simplicité et l'universalité. Le système est testé par le biais de différents scénarios illustrant son comportement dans diverses situations. Lorsque l'architecture du prototype est validée, un montage physique comprenant un récepteur GPS, un capteur d'orientation, une caméra ainsi qu'un véhicule commercial est réalisé afin de procéder à l'acquisition de données réelles. Ces données sont alors fournies en entrée au systéme. Deux problèmes importants se présentent, soit l'imprécision du GPS ainsi que la dérive du capteur d'orientation. Des solutions tel que l'interpolation et le ltre de Kalman sont proposées et les résultats sont analysées. Malgré les simplifications, les essais permettent de prouver la faisabilité d'un système complet, en mettant l'accent sur l'importance de posséder des capteurs de position et d'orientation sans biais ni dérive. Finalement, certaines améliorations utilisant la vision numérique sont présentées afin de pouvoir obtenir, dans le futur, un système en boucle fermée.
|
|
|
|
Schéma bloc du prototype virtuel réalisant la réalité augmentée sur des images de synthèse. |
 |
Schéma bloc du prototype réel réalisant la réalité augmentée sur l'image d'une caméra et utilisant les données acquises à l'extérieur |
 |
Image obtenue avec la ville simulée. La trajectoire est superposée sur l'image de la route en 3D. Pour bien la distinguer de profil, le côté droit est vert et le côté gauche est magenta. |
 |
Véhicule utilisé pour l'acquisition des données. On remarque les différents capteurs, soit l'antenne GPS, la caméra et le capteur de rotation. |
 |
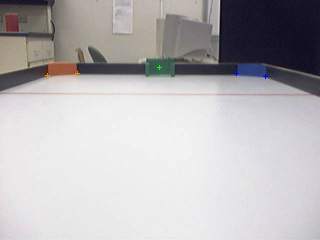
Image obtenue avec le prototype réel. L'image de la caméra augmentée à l'aide d'une scène 3D imitant le monde réel. Dans cette scène est affiché une trajectoire relative à la position et l'orientation du véhicule tel qu'acquise par les capteurs |
 |
Image du prototype réel. La flèche verte indique la destination à atteindre. |
 |
Autre image du prototype réel à un autre endroit du campus. |
![]()
![]()
![]()