
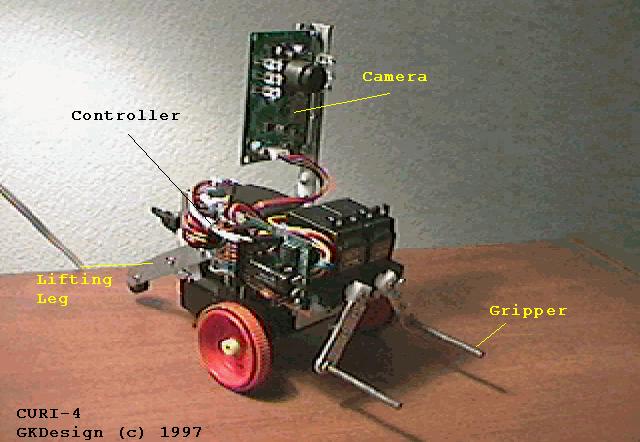
The CURI-4 platform was developed to investigate a layered behavioral control scheme for a mobile robot. CURI-4 is a small tethered robot equipped with a camera and a gripper for grasping objects. The tether carries data as well as power. The main robot components are 2 DC motors with gearboxes for the drive mechanism, 4 RC type servo motors, a small CCD camera and custom electronics for the motor control. The drive configuration is a tripod with 2 individually powered wheels and a static caster skid. One servo controls the pitch of the camera, 2 servos are used in the gripper, and the fourth servo is used for a leg that allows the robot to tilt raising and lowering the gripper. The camera can be positioned so that it can image it’s own gripper in order to see what it is picking up. The structural frame largely consists of aluminum and plastic, with several steel components. It's size is a mere 7.5" x 7" x 4" ( 20cm x 18cm x 10 cm). and 7.5" x 5" x 4" ( 20cm x 12cm x 10 cm) with camera fully retracted.
CURI-4 is controlled by a 486DX40, 8Mb RAM, 500Mb HDD equipped with a Creative Labs Video Blaster for image capture. CURI-4 interfaces to the PC via an Interface Unit that houses power supplies as well as some control electronics.
The custom software being developed for CURI-4 is aimed at providing prioritized behavior control. The robot’s primary behavior is to play with a ball. This involves finding it, picking it up and hiding it. For convenience it forgets where it hides it and has to do it all again. On top of this behavior are superimposed higher priority behaviors that help CURI-4 avoid obstacles and deal with other real world situations. If it hears a loud noise, it suspends its ball hiding/finding behavior and attempts to hide itself in a dark corner. After a period of silence, the original behavior resumes. Upon hearing a whistle it attempts to follow anything that moves. During each behavior, higher priority behaviors interrupt the current one and return to it only when the higher behavior has finished. Yes, it does sound like a pet dog, or cat, and in fact that is the main research aim. The approximate cost of CURI-4 was ~US$300.
For those of you that are opposed to tethered robots, and believe that fully autonomous robots are the way, check out my previous project CURI-3 developed in 1994 for the University of New South Wales Artificial Intelligence Lab in Sydney Australia. CURI-3 is a fully autonomous mobile robot with a built in IBM PC and stereo cameras. Currently it is being used for a number of research projects.
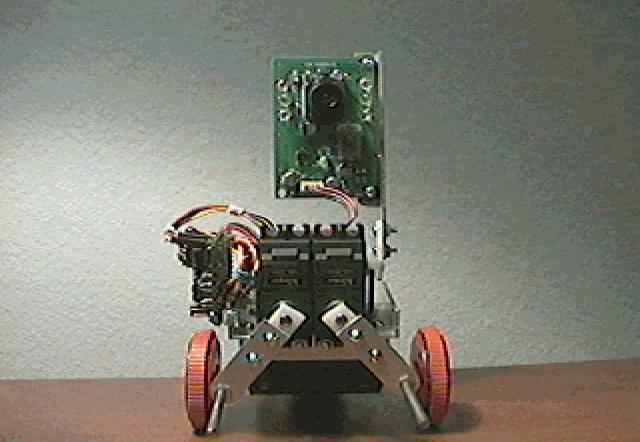 Front view. Showing the gripper configuration.
Each gripper arm can move from fully horizontal to full vertical.
Front view. Showing the gripper configuration.
Each gripper arm can move from fully horizontal to full vertical.
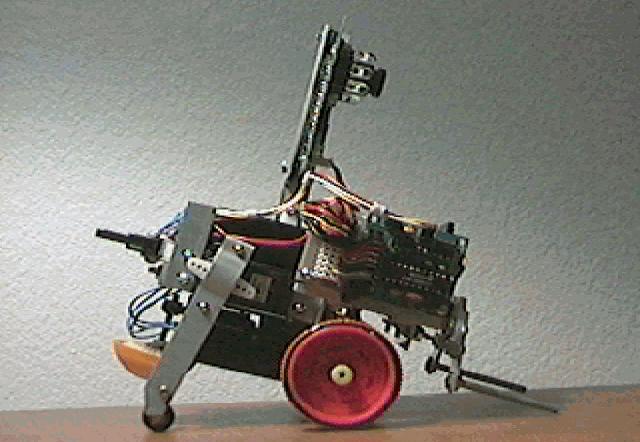
 Side view. The yellow caster skid can be seen under the lifting leg.
Because CURI-4 is light weight, and most weight is centered on the drive wheels a skid
is an efficient alternative to a caster wheel.
Side view. The yellow caster skid can be seen under the lifting leg.
Because CURI-4 is light weight, and most weight is centered on the drive wheels a skid
is an efficient alternative to a caster wheel.
 Top view. The servo controlling the camera pitch can be seen in this image. Also
just behind the servo is the tether connector.
Top view. The servo controlling the camera pitch can be seen in this image. Also
just behind the servo is the tether connector.
 Camera fully retracted. This allows CURI-4 to fit under low bridges
Camera fully retracted. This allows CURI-4 to fit under low bridges
 Camera in the forward position imaging the gripper
Camera in the forward position imaging the gripper
 Lifting leg raises the tail end of the robot allowing the gripper to be lowered
Lifting leg raises the tail end of the robot allowing the gripper to be lowered
 Lifting leg fully retracted
Lifting leg fully retracted
[Home] | [Publications] | [Past Projects] | [New Projects] |