
Date: 8th June 1998
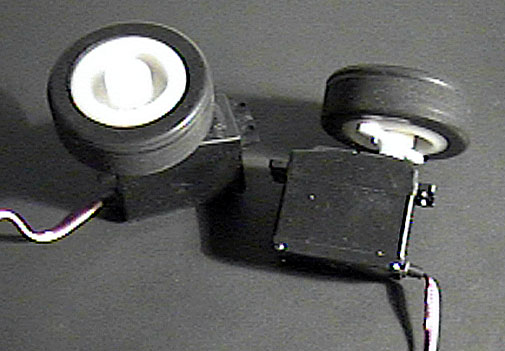 Status: Construction commences. Two R/C servo motors were modifed for continuous operation. A small rubber wheel was attached to each of the servos. The tread on each wheel was buffed down with a file to give a better grip on smooth surfaces. This also removed any unevenness in the wheel.
Status: Construction commences. Two R/C servo motors were modifed for continuous operation. A small rubber wheel was attached to each of the servos. The tread on each wheel was buffed down with a file to give a better grip on smooth surfaces. This also removed any unevenness in the wheel.
Date: 10th June 1998
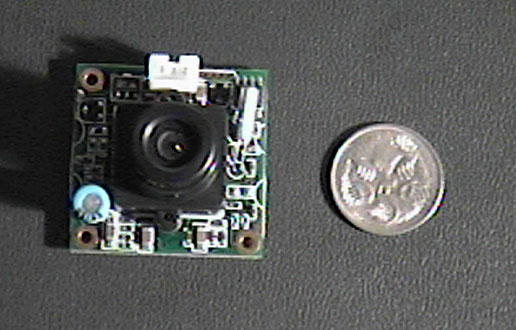 Status: A small CMOS camera is aquired. This will be the primary navigation sensor for the robot. This camera is about 1/3 the size of the one used by CURI-4. The other advantage it has is that it draws little current. This camera will be tethered to a Snappy (tm) video capture device connected to the controller PC's parallel port.
Status: A small CMOS camera is aquired. This will be the primary navigation sensor for the robot. This camera is about 1/3 the size of the one used by CURI-4. The other advantage it has is that it draws little current. This camera will be tethered to a Snappy (tm) video capture device connected to the controller PC's parallel port.
Date: 17th June 1998
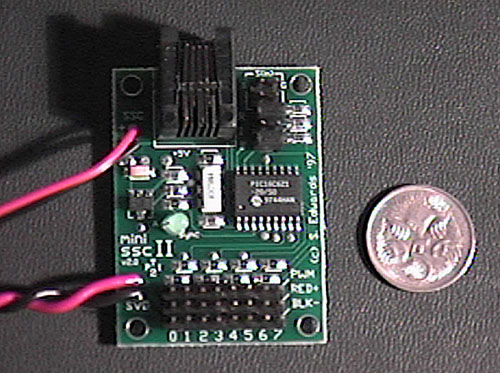 Status: The Mini Serial Servo Controller II is purchased from Scott Edwards Electronics. This great little device can control up to 8 R/C servos from a serial port. This unit will control all the servos onboard CURI-5.
Status: The Mini Serial Servo Controller II is purchased from Scott Edwards Electronics. This great little device can control up to 8 R/C servos from a serial port. This unit will control all the servos onboard CURI-5.
[Home] | [Publications] | [Past Projects] | [New Projects] |