2
Vehicle and Head Geometry
2.1 Vehicle Geometry
and Kinematics
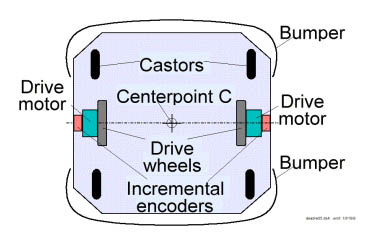
The Robot used in this work, shown in Figure 1, has six wheels: four
run freely on a fixed transverse axis on each corner, while the two center
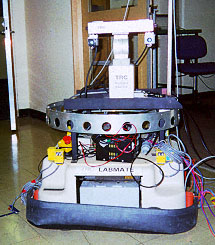
wheels are motor driven. A high performance four-axis active stereo head
(see Figure 2) is mounted with its horizontal tilt axis parallel to the
floor, see Figure 4. The fiduciary head center is defined to lie
where the pan axis intersects the horizontal plane containing the tilt
axis. This point, fixed relative to the vehicle regardless of head movements,
is used to define the vehicles location relative to a world coordinate
frame, as seen in Figure 3.
(a)
|
(b)
|
Figure 1. (a)
Photo of the TRC Labmate platform. (b) Robots Differential-drive.
The robot is assumed to always move on the xz ground-plane. Its
position and orientation are specified by the coordinates (x, z, f).
The robot-centered frame has its origin on the ground plane directly under
the head center, with its z-axis pointing to the front of the robot, x-axis
to the right, and y-axis downwards.

(a)
|

(b)
|
Figure 2: (a)
TRC Bisight head. (b) Geometry of the active head. P goes vertically
through the pan axis and T goes horizontally through the elevation
axis.
(a)
|

(b)
|
Figure 3. (a)
Photo of the robot, showing the mobile platform and the head. (b) The vehicles
location in the world coordinate frame is specified with the coordinates
(x, z, f). The R coordinate frame is
carried with the vehicle.
(a)
|
(b)
|
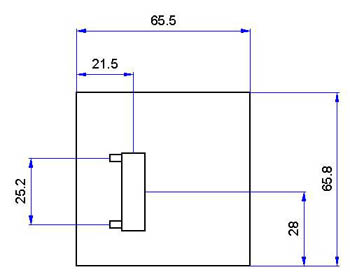
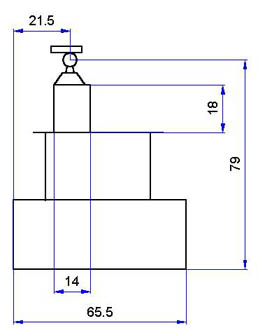
Figure
4. Mobile Platform configuration. (a) Top-view showing the position of
the stereo head. (b) Robots side-view. All dimensions are in centimeters.
2.2 Head Geometry
Locating a feature with the active head provides a 3D measurement of
its location from stereo and knowledge of the head geometry (Figure 2(b)).
The 3D-position hG of a feature relative to the head
center can be calculated in the R vehicle-center frame, if the position
uL,vL
in the left cameras image and
uR,vR
in the right one are known.
Homepage
| Table of Contents
This page hosted by  Get your own Free Home Page
Get your own Free Home Page
Last update: 12/11/99
Comments, suggestions and queries to manuel@earthling.net.
Copyright © 1999 Manuel Noriega.