Attempting to re-calibrate the cameras, 16 features in the stereo pair obtained at the starting position were used to try to find the fundamental matrix. The 16 features and their coordinates in camera pixels are shown in Table 5. The 8-point algorithm described in [4] was used generating the 16 ´ 9 matrix shown in Table 6. This matrix M is called the measurement matrix. The equation Mf = 0 was solved where f is the fundamental matrix represented as a 9-vector. The solution was f = 0, which is the trivial solution. And therefore could not be used.
Then a 6-point algorithm was tried, using the value in Table 6 to fill the following equation:
Solving the previous equation gave the following results:
| f2 = |
0.002698
|
| f3 = |
-0.799357
|
| f4 = |
-0.002669
|
| f7 = |
0.821643
|
| f8 = |
-0.866264
|
| f9 = |
-50.599253
|

These values are part of the fundamental matrix, denoted as the common elevation fundamental matrix.
In terms of the camera parameters we have:
where
|
|
|
|
|
|
|
|
|
|
100
|
243
|
73
|
246
|
195.8300
|
491.0544
|
142.9559
|
497.1168
|
|
82
|
60
|
55
|
64
|
160.5806
|
121.2480
|
107.7065
|
129.3312
|
|
104
|
60
|
77
|
64
|
203.6632
|
121.2480
|
150.7891
|
129.3312
|
|
199
|
135
|
168
|
136
|
389.7017
|
272.8080
|
328.9944
|
274.8288
|
|
193
|
215
|
166
|
220
|
377.9519
|
434.4720
|
325.0778
|
444.5760
|
|
150
|
180
|
124
|
185
|
293.7450
|
363.7440
|
242.8292
|
373.8480
|
|
193
|
238
|
166
|
244
|
377.9519
|
480.9504
|
325.0778
|
493.0752
|
|
175
|
180
|
148
|
185
|
342.7025
|
363.7440
|
289.8284
|
373.8480
|
|
84
|
223
|
57
|
226
|
164.4972
|
450.6384
|
111.6231
|
456.7008
|
|
133
|
129
|
108
|
134
|
260.4539
|
260.6832
|
211.4964
|
270.7872
|
|
193
|
157
|
167
|
163
|
377.9519
|
317.2656
|
327.0361
|
329.3904
|
|
92
|
80
|
65
|
84
|
180.1636
|
161.6640
|
127.2895
|
169.7472
|
|
296
|
129
|
271
|
135
|
579.6568
|
260.6832
|
530.6993
|
272.8080
|
|
96
|
194
|
71
|
201
|
187.9968
|
392.0352
|
139.0393
|
406.1808
|
|
341
|
191
|
312
|
198
|
667.7803
|
385.9728
|
610.9896
|
400.1184
|
|
76
|
198
|
48
|
206
|
148.8308
|
400.1184
|
93.9984
|
416.2848
|
Table 6. 16 ´
9 measurement matrix.
|
|
|
|
|
|
|
|
|
|
|
27995.0539
|
70199.1237
|
142.9559
|
97350.3829
|
244111.3920
|
497.1168
|
195.8300
|
491.0544
|
1
|
|
17295.5744
|
13059.1977
|
107.7065
|
20768.0817
|
15681.1493
|
129.3312
|
160.5806
|
121.2480
|
1
|
|
30710.1906
|
18282.8768
|
150.7891
|
26340.0061
|
15681.1493
|
129.3312
|
203.6632
|
121.2480
|
1
|
|
128209.6770
|
89752.3043
|
328.9944
|
107101.2506
|
74975.4953
|
274.8288
|
389.7017
|
272.8080
|
1
|
|
122863.7722
|
141237.2019
|
325.0778
|
168028.3439
|
193155.8239
|
444.5760
|
377.9519
|
434.4720
|
1
|
|
71329.8634
|
88327.6645
|
242.8292
|
109815.9808
|
135984.9669
|
373.8480
|
293.7450
|
363.7440
|
1
|
|
122863.7722
|
156346.2979
|
325.0778
|
186358.7087
|
237144.7147
|
493.0752
|
377.9519
|
480.9504
|
1
|
|
99324.9173
|
105423.3415
|
289.8284
|
128118.6442
|
135984.9669
|
373.8480
|
342.7025
|
363.7440
|
1
|
|
18361.6874
|
50301.6552
|
111.6231
|
75126.0028
|
205806.9178
|
456.7008
|
164.4972
|
450.6384
|
1
|
|
55085.0622
|
55133.5583
|
211.4964
|
70527.5823
|
70589.6738
|
270.7872
|
260.4539
|
260.6832
|
1
|
|
123603.9154
|
103757.3045
|
327.0361
|
124493.7275
|
104504.2429
|
329.3904
|
377.9519
|
317.2656
|
1
|
|
22932.9346
|
20578.1297
|
127.2895
|
30582.2666
|
27442.0113
|
169.7472
|
180.1636
|
161.6640
|
1
|
|
307623.4580
|
138344.3918
|
530.6993
|
158135.0123
|
71116.4624
|
272.8080
|
579.6568
|
260.6832
|
1
|
|
26138.9435
|
54508.2998
|
139.0393
|
76360.6906
|
159237.1712
|
406.1808
|
187.9968
|
392.0352
|
1
|
|
408006.8184
|
235825.3667
|
610.9896
|
267191.1852
|
154434.8192
|
400.1184
|
667.7803
|
385.9728
|
1
|
|
13989.8571
|
37610.4894
|
93.9984
|
61955.9998
|
166563.2081
|
416.2848
|
148.8308
|
400.1184
|
1
|
Solving equations (1) we obtain:
| a = |
0.002698
|
| b = |
-296.256711
|
| c = |
-0.002669
|
| d = |
0.998117
|
| e = |
-0.866264
|
| b' = |
-307.815301
|
And this in turn gives us the following results:
| qL = |
89.845405
|
| qR = |
90.152938
|
| v0 = |
296.256711
|
| v0 = |
307.815301
|
| fku = |
121.497168
|
which do are not reliable compared to the previous values used. Fku has a value that is too small. And when tested gave incorrect results. But since we are only interested in determining the robots position from its starting point, we need only be able to determine the robots relative movements from its initial location and not the absolute values. Therefore we can use the current camera calibration since relative measurements are mostly independent of camera calibration. And the current calibration is good enough.
The location of the robot could not be calculated at all locations. The only values obtained are for locations 0 through 2. This was due to the fact that not all tracked features could be stereo matched. The algorithms to track features and stereo match are independent and therefore do not guarantee that all tracked features will be stereo matched. In addition, the tracking algorithm only works with the left images and therefore does not know if the feature is no longer visible in the right image.
The algorithm to stereo match features works pretty good, but as seen in Table 4, the KLT tracking algorithm did not find many features even though through careful examination of the features stored in the images, we can see that more features are still visible but were not tracked. This could be due to a great shift in features location from one set of images to the next. Snapshots taken at smaller intervals could provide better results, since features would shift a smaller distance. And more features tracked would provide a better estimate of the robots position. Consequently in Figure 23 only the two first legs of the robots journey is displayed. But approximating the location of the robot by averaging all stereo matched features, gives us the results shown in Figure 24. This is only an approximation that is reasonable since most features found are on the front wall and therefore practically at the same distance from the robot in the z-direction. Thus only paying attention on the z-values, we see in Figure 24, that the movement in such direction is pretty well tracked.
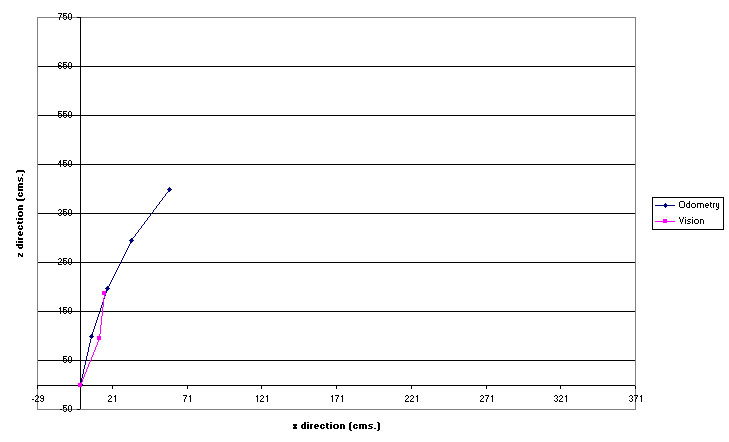
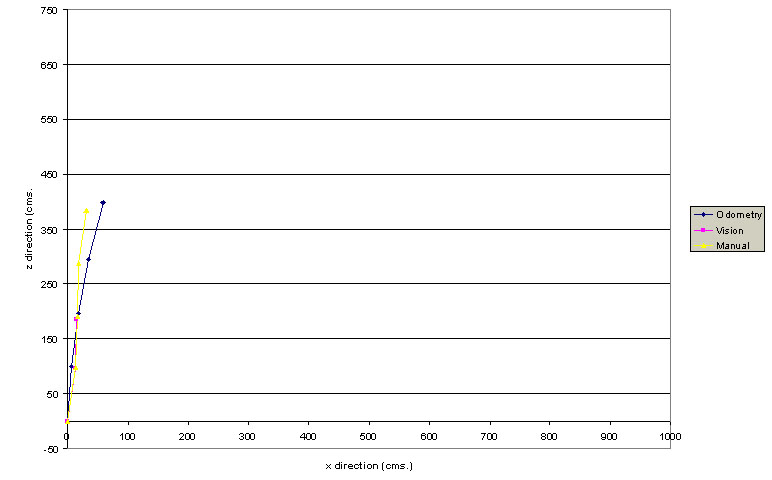
Figure 24. Robot
progress including manual calculation of all locations