Gandalf
My second fire fighting robot, Gandalf. He uses an HC11E0 with an Xicor X68C75, with 40Kb of memory. The board came from Technological Arts. He has two layers made of plastic, and has boards mounted on both top and bottom of layers.
Gandalf uses a fan mounted on the side of the UV tube to blow out the candle. The UV tube is what is used to detect the candle. Two standard servos are used for motion, with a nice roler ball caster (is that what they're called???) mounted on the back.
The wheels are wooden disks with rubber bands taped to them for traction using double-sided foam tape (the ruber band idea came from the CRS).
The UV tube and fan were mounted on a servo motor for scanning, although this was my plan, I did not use it because it went way to fast so that it missed the candle. I could have slowed it down, but I was running low on time, so instead he swivels his whole body to scan.
Gandalf operated in Sound Activation mode and Non-Deadreckoning mode. At the contest he did qualify, but wasn't able to blow out the candle in the three runs.
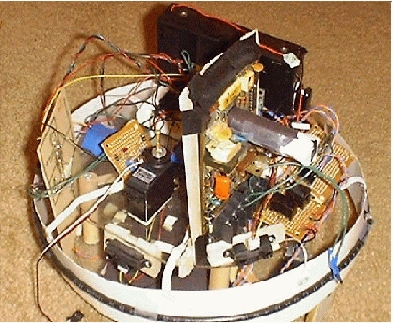
Here is a recent picture of Gandalf...you can see that I mounted the UV tube to the left of him. This is essetial for my new plan.

Here is a front view of Gandalf right after the contest. You can see the UV tube, and the fan

Here is a view of Gandalf's right side, you can see the GP2D12 IR sensor and a motor driver board for the fan.

Here is a view of the main board from Tech Arts. You can also see the 3 - 9V batts. for the UV tube