
Página Principal Noções
Básicas Algoritmos
Genéticos Redes Neurais
Multiagentes
Cognição Software
Artigos Tutoriais
Links Quem
sou eu
Agentes
Inteligência Artificial Distribuída (IAD)
Conceituaçăo
A palavra “agente” se refere a todo ente que possui a habilidade, capacidade e permissăo para atuar em nome de outro. Falando em termos humanos, agentes seriam pessoas com um conhecimento ou recurso mais especializado em determinada área, mediante o qual ajudariam outras pessoas em suas tarefas. Por exemplo, uma secretária atende e resolve situaçőes em nome do seu chefe livrando-o assim de determinadas tarefas como agendamento de visitas e reuniőes.
Năo existe ainda um consenso quanto ŕ definiçăo de agente. No entanto, os pesquisadores tem formulado diversas definiçőes de acordo com a sua área de atuaçăo, dentre as quais podemos destacar:
| Wooldridge & Jennings [WOO 94]: Agentes săo sistemas que apresentam um comportamento determinado por um processo de raciocínio baseado na representaçăo de suas atitudes, tais como crenças, comprometimentos e desejos. Eles acreditam que um sistema pode ser visto como um agente se ele possuir as seguintes propriedades: autonomia, habilidade social, reatividade, pró-atividade. | |
| Pattie Maes [MAE 94]: Agentes săo sistemas computacionais que habitam algum ambiente dinâmico e imprevisível, sensoriando seu estado e atuando autonomamente, executando uma série de objetivos ou tarefas para os quais foram implementados. | |
| Nwana [NWA 96]: Um agente é um componente de software ou hardware que é capaz de atuar para poder executar uma tarefa em nome de um usuário. | |
| Russel & Norvig [RUS 95]: Segundo eles, a inteligęncia está altamente ligada com açőes racionais. Agir racionalmente significa agir de forma a alcançar as metas definidas por alguém, dadas as crenças deste alguém. Neste sentido, definem genericamente um agente como algo que percebe seu ambiente por meio de sensores e atua contra este ambiente por meio de atuadores. | |
| Franklin & Graesser [FRA 96]: Um agente autônomo é um sistema situado em um meio ambiente, do qual ele faz parte e percebe, agindo sobre o mesmo continuamente, num período de tempo, buscando suas açőes em sua própria agenda, podendo suas açőes afetar suas percepçőes futuras. |
Segundo Wooldridge & Jennings [WOO 95], um agente humano possui olhos, ouvidos, e outros órgăos de sensoriamento, e măos, pernas, boca, e outras partes do corpo como atuadores. Um agente robótico utiliza câmeras e sensores (ultra-som, infravermelho) como sensores e vários motores como atuadores. Já um agente de software possui strings de bits codificadas como suas percepçőes e açőes. A figura 1 mostra o diagrama de um agente genérico segundo Russel [RUS 95].
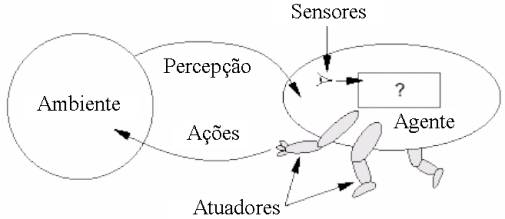
Figura 1: diagrama de um agente genérico
Das definiçőes vistas até o momento, é possível extrair algumas características comuns aos agentes: devem estar inseridos em um ambiente, devem ter capacidade de sensoriar o seu entorno e atuar sobre ele, e devem agir segundo os objetivos para os quais foram implementados. Portanto, devem possuir uma série de atributos ou propriedades que os definem como agentes (năo necessariamente o agente deve apresentar todas estas propriedades) [FER 98], [VAL 98]:
Autonomia: os agentes podem operar sem a intervençăo de humanos ou de outros agentes;
Como foi dito anteriormente, năo existe um consenso universal sobre a definiçăo de agente, logo, corre-se o risco de que qualquer programa seja denominado agente. Pode-se distinguir duas noçőes extremas de agentes [WOO 95]:
A classificaçăo dos agentes pode ser efetuada de diversas formas, sendo que a mais usual é aquela realizada de acordo com a linha de pesquisa e desenvolvimento, na qual é priorizada a funçăo ou objetivo principal do agente. dessa forma, podemos realizar a seguinte classificaçăo [BER 96], [WOO 95]:
1. Observando e imitando o usuário;2. Mediante recebimento de um feedback positivo ou negativo por parte do usuário;3. Recebendo instruçőes explícitas do usuário;4. Mediante ajuda de outros agentes.
Quanto ao método utilizado para dotar o agente de inteligęncia (ou comportamento inteligente), podemos classificar os agentes em tręs grupos distintos de arquiteturas, dependendo do tipo de processamento utilizado [ALV 97], [FER 98], [TOM 96]:
Segundo Demazeau & Müller [DEM 90], um agente deliberativo genérico teria a estrutura apresentada na figura 2.
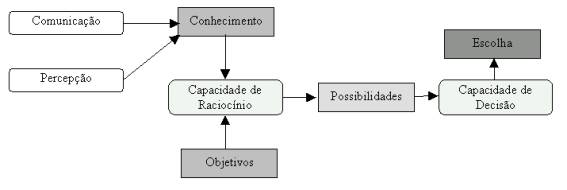
Figura 2: estrutura de um agente deliberativo genérico
Como foi explanado na seçăo referente ŕs propriedades, năo necessariamente um agente deve apresentar todas as ali listadas, mesmo porque seria extremamente difícil implementar um agente que incorporasse todas aquelas características. Dado isso, o conjunto de características componentes de um agente vai depender do tipo de aplicaçăo a que ele se propőe.
Existem diversas propostas sobre tipologia de agentes [NWA 96], [FRA 96], [WOO 94], todas baseadas na análise das características em comum entre os diversos tipos de agentes. Segundo Nwana [NWA 96] podemos classificar tipologicamente os agentes de acordo com:
Tendo estabelecido essa tipologia, Nwana diferenciou 7 categorias de agentes: agentes colaborativos, agentes de interface, agentes móveis, agentes de informaçăo, agentes reativos, agentes híbridos e agentes inteligentes.

Figura 3: Tipologia de agentes proposta por Nwana.
Já Franklin e Graesser [FRA 96] afirmam que um agente deve ser um processo em contínua execuçăo e deve possuir ao menos as propriedades de autonomia, reatividade e pró-atividade. Após o estudo de diversas definiçőes de agentes, apresentaram a seguinte taxonomia (figura 4):
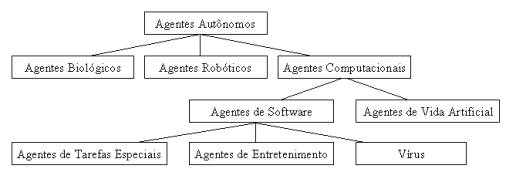
Figura 4: Taxonomia de agentes proposta por Franklin e Graesser.
Por fim, os agentes podem melhorar sua coordenaçăo e coeręncia gerenciando o quę, como e quando se comunicam entre si [FER 98]. Por meio da comunicaçăo os agentes podem ter uma visăo menos local do problema e, desta forma, adquirir o conhecimento e a sincronia (em relaçăo aos demais agentes) necessários ŕ resoluçăo do problema. Deve-se levar em conta, que se a comunicaçăo entre agentes for excessiva, estará sendo criada uma sociedade de agentes burocráticos onde a carga de comunicaçăo poderá ser maior que o trabalho efetivamente realizado. A seguir săo explanadas as formas mais usuais de comunicaçăo entre agente [FER98]:
![]() Sem comunicaçăo: os agentes podem interatuar sem existęncia
de comunicaçăo entre eles, podendo ocorrer inferęncia de uns sobre as açőes
de outros. Esta situaçăo pode ocorrer em virtude de falhas de hardware, impossibilidade
de comunicaçăo ou pelo desejo de uma maior autonomia por parte dos agentes.
Sem comunicaçăo: os agentes podem interatuar sem existęncia
de comunicaçăo entre eles, podendo ocorrer inferęncia de uns sobre as açőes
de outros. Esta situaçăo pode ocorrer em virtude de falhas de hardware, impossibilidade
de comunicaçăo ou pelo desejo de uma maior autonomia por parte dos agentes.
![]() Comunicaçăo primitiva: comunicaçăo restrita a um número de sinais
com interpretaçăo fixa. Tem sido aplicada em SMA para resoluçăo de conflitos
entre dois agentes mediante um mediador mas a coordenaçăo que pode ser obtida
é bastante limitada (ceder o turno por meio de um mediador que sincroniza
os agentes);
Comunicaçăo primitiva: comunicaçăo restrita a um número de sinais
com interpretaçăo fixa. Tem sido aplicada em SMA para resoluçăo de conflitos
entre dois agentes mediante um mediador mas a coordenaçăo que pode ser obtida
é bastante limitada (ceder o turno por meio de um mediador que sincroniza
os agentes);
![]() Quadro-negro: consta de tręs componentes principais: o quadro-negro,
um conjunto de Fontes de Conhecimento (KSs, Knowledge Sources) e um mecanismo
de controle. O quadro-negro é uma base de dados global contendo dados e hipóteses
(soluçőes parciais potenciais). É freqüentemente utilizado o conceito de agenda
para gerenciar a concorręncia no acesso ao quadro-negro. Esta agenda é gerenciada
por um monitor que ativa as fontes de conhecimento adequadas, de acordo com
o conteúdo do quadro-negro. Este tipo de comunicaçăo provém da metáfora de
um grupo de pessoas que resolve um problema conjuntamente, utilizando “tempestade
de idéias“. Ou seja: uma pessoa escreve no quadro uma idéia para a soluçăo
do problema em foco, outra dá uma nova idéia ou sugere uma modificaçăo ŕ(s)
idéia(s) já existente(s) e escreve no quadro, e assim por diante, até chegar
a uma soluçăo que agrada a todos os membros do grupo.
Quadro-negro: consta de tręs componentes principais: o quadro-negro,
um conjunto de Fontes de Conhecimento (KSs, Knowledge Sources) e um mecanismo
de controle. O quadro-negro é uma base de dados global contendo dados e hipóteses
(soluçőes parciais potenciais). É freqüentemente utilizado o conceito de agenda
para gerenciar a concorręncia no acesso ao quadro-negro. Esta agenda é gerenciada
por um monitor que ativa as fontes de conhecimento adequadas, de acordo com
o conteúdo do quadro-negro. Este tipo de comunicaçăo provém da metáfora de
um grupo de pessoas que resolve um problema conjuntamente, utilizando “tempestade
de idéias“. Ou seja: uma pessoa escreve no quadro uma idéia para a soluçăo
do problema em foco, outra dá uma nova idéia ou sugere uma modificaçăo ŕ(s)
idéia(s) já existente(s) e escreve no quadro, e assim por diante, até chegar
a uma soluçăo que agrada a todos os membros do grupo.
![]() Passagem de mensagens: permite que um agente envie uma mensagem
a um ou mais agentes cujos nomes deve conhecer. A diferença principal em relaçăo
ao quadro-negro, é que o agentes deve conhecer o seu entorno para saber exatamente
a qual agentes deve enviar a mensagem. Estas mensagens podem ser tanto de
solicitaçăo de serviços e informaçőes, quanto de respostas a tais solicitaçőes.
Passagem de mensagens: permite que um agente envie uma mensagem
a um ou mais agentes cujos nomes deve conhecer. A diferença principal em relaçăo
ao quadro-negro, é que o agentes deve conhecer o seu entorno para saber exatamente
a qual agentes deve enviar a mensagem. Estas mensagens podem ser tanto de
solicitaçăo de serviços e informaçőes, quanto de respostas a tais solicitaçőes.
![]() Comunicaçăo de alto nível: tem sido dispendido grande esforço
por parte dos pesquisadores para estudar as interaçőes entre os agentes no
nível de conhecimento em vez de no nível simbólico. Desta forma, tenta-se
fazer com que os agentes compreendam as intençőes, desejos e objetivos de
outros agentes, e que os mesmos sejam capazes também de transmitir estes desejos,
objetivos e intençőes por meio do uso de teorias provenientes da área da linguagem
natural, especialmente na análise e geraçăo de discurso.
Comunicaçăo de alto nível: tem sido dispendido grande esforço
por parte dos pesquisadores para estudar as interaçőes entre os agentes no
nível de conhecimento em vez de no nível simbólico. Desta forma, tenta-se
fazer com que os agentes compreendam as intençőes, desejos e objetivos de
outros agentes, e que os mesmos sejam capazes também de transmitir estes desejos,
objetivos e intençőes por meio do uso de teorias provenientes da área da linguagem
natural, especialmente na análise e geraçăo de discurso.
![]() Interaçăo homem-máquina: a comunicaçăo entre um agente artificial
e um agente humano tem tido grande ęnfase nos últimos tempos. Tem sido realizadas
duas abordagens básicas: encapsular o agente humano modelando suas interaçőes
em uma linguagem de comunicaçăo de agentes ou aproveitar a tecnologia multiagente
para simplificar as interfaces homem-máquina.
Interaçăo homem-máquina: a comunicaçăo entre um agente artificial
e um agente humano tem tido grande ęnfase nos últimos tempos. Tem sido realizadas
duas abordagens básicas: encapsular o agente humano modelando suas interaçőes
em uma linguagem de comunicaçăo de agentes ou aproveitar a tecnologia multiagente
para simplificar as interfaces homem-máquina.
![]()
Inteligęncia Artificial Distribuída (IAD)
Durante vários anos, as pesquisas relacionadas ŕ computaçăo distribuída limitavam-se ŕ conexăo física de vários processadores, tratando a troca de dados entre os mesmos e a forma como era efetuado o seqüenciamento entre tais processadores pelo sistema operacional. Desta forma, o termo “Processamento Distribuído” praticamente vinha sendo utilizado quase que unicamente para designar este tipo de problema [TOM 96].
A partir do início da década de 80, as questőes referentes ao processamento distribuído tiveram uma mudança de paradigma, voltando-se para as estratégias pelas quais a decomposiçăo e coordenaçăo do processamento em um sistema distribuído seriam conjugadas com as demandas estruturais do domínio das tarefas [TOM 96], dando entăo origem ŕ Resoluçăo Distribuída de Problemas.
Em paralelo a essas mudanças, evoluía também a pesquisa na área da Inteligęncia Artificial, que tomando inspiraçăo em metáforas sociais e investindo no campo da computaçăo distribuída, inicia um processo de renovaçăo de conceitos na construçăo de sistemas inteligentes, dando origem a Inteligęncia Artificial Distribuída. Segundo Bond & Gasser [BON 88], algumas das motivaçőes mais freqüentes para utilizaçăo de IAD săo:
Outra vertente da IAD săo os Sistemas Multiagentes, onde năo se parte de um problema específico como nos sistemas RDP, mas se busca a coordenaçăo entre um conjunto de agente autônomos, possivelmente pré-existentes, estudando a forma como eles podem coordenar seus conhecimentos, metas, habilidades e planos conjunta e harmoniosamente, de forma a realizar uma açăo ou resolver um problema [BON 88].
Nas abordagens Clássicas de Inteligęncia Artificial (IA), a ęnfase da inteligęncia é baseada em um comportamento humano individual e o foco de atençăo volta-se ŕ representaçăo de conhecimento e métodos de inferęncia. Já a Inteligęncia Artificial Distribuída (IAD), é baseada em comportamento social e sua ęnfase é para cooperaçőes, interaçőes e para o fluxo de conhecimento entre unidades distintas [OLI 96]. Logo, a IAD é um dos ramos da Inteligęncia Artificial que concentra o seu foco no comportamento inteligente que emerge como produto da cooperaçăo de diversas entidades as quais denominamos agentes.
Como foi explanado nesta seçăo, podemos dividir a IAD basicamente em duas áreas, sendo que ambas trabalham com o conceito de agentes: Resoluçăo Distribuída de Problemas (RDP) e Sistemas Multiagentes (SMA), sendo que a RDP estuda como um conjunto de módulos cooperam para dividir e compartilhar o conhecimento de um problema e no desenvolvimento da soluçăo, enquanto os SMA estudam a coordenaçăo da conduta inteligente entre um grupo de agentes inteligentes autônomos. A seguir será dada uma definiçăo um pouco mais abrangente ŕ respeito de RDP e SMA, procurando esclarecer melhor cada uma dessas abordagens, de forma a dirimir dúvidas quanto ŕs diferenças mais marcantes entre elas.
![]()
Resoluçăo Distribuída de Problemas (RDP)
Na Resoluçăo Distribuída de Problemas, os agentes (também denominados nodos ou módulos) cooperam uns com os outros, dividindo e compartilhando conhecimento sobre o problema (preciso e inicialmente conhecido) e sobre o processo de obter uma soluçăo. Nesta abordagem, os agentes săo projetados especificamente para resolver aquele problema ou classe de problemas e costuma existir um planejamento centralizado da resoluçăo do mesmo (costuma existir um membro que exerce um controle global e centraliza os resultados parciais e dados obtidos pelos demais componentes do sistema). Sob um ponto de vista externo, um sistema RDP é visto como uma unidade.
O processo de coordenaçăo das açőes dos agentes é definido em tempo do projeto [OLI 96], dessa forma, os agentes năo existem antecipadamente, ou seja: sua concepçăo, organizaçăo e interaçăo săo idealizadas face ŕ existęncia de um problema a ser solucionado. Na figura 5 [SIC 95], pode ser vista a representaçăo de um sistema RDP
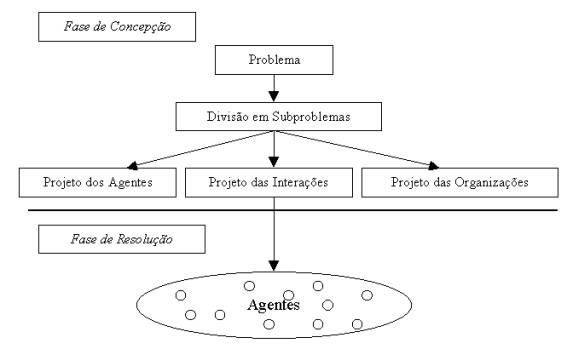
Figura 5: Estrutura de um sistema RDP segundo Sichman
A estratégia de resoluçăo, na RDP, apresenta as seguintes características [ALV 97]:
Dessa forma, nos sistemas RDP sempre se parte de um problema bem definido, para cuja soluçăo um controlador exerce uma distribuiçăo das tarefas estática e pressupostamente ótima, atribuindo partes do problema aos agentes componentes do sistema segundo critérios de eficácia geral [ALO 97]. Nesse tipo de sistema, o conhecimento é completo apenas no agente central (nodo central), enquanto que os demais agentes possuem apenas conhecimento completo sobre suas próprias tarefas e sobre os mecanismos com que foram dotados para executa-las com eficięncia; ou seja, eles năo possuem uma visăo global do problema (sequer sabem qual é) nem do sistema, visto que năo participam do planejamento nem da síntese de resultados. Logo, săo considerados sistemas totalmente precisos/quase autônomos (CA/NA – completely accurate/nearly autonomous).
Os sistemas RDP apresentam um controle centralizado e guiado externamente (trabalha em funçăo de requisiçőes) em busca dos objetivos, controle este determinado pela transmissăo de objetivos e tarefas de modo explícito. Ou seja, quando o agente central envia uma requisiçăo a um outro agente, este último executará alguma açăo como resposta, no sentido de cumprir a requisiçăo. Sendo assim, os agentes possuem menos autonomia na hora de processar suas estratégias e, conseqüentemente, seu comportamento será pouco flexível. Quanto mais explícita seja esta requisiçăo e quanto mais externamente seja guiado um agente, tanto mais explícita será a forma de controle [ALO 97].
Além de tudo, os sistemas RDP fazem uso de comunicaçăo primitiva, ou seja, a comunicaçăo é restrita a um conjunto pré-definido de sinais com uma interpretaçăo fixa, o que, devido ŕs restriçőes impostas pela quantidade e tipos de sinais limita a cooperaçăo entre agentes.
O SMA é um tanto diferente da RDP pois ele faz uso do conceito de “comunidade de agentes inteligentes”, cujo enfoque se baseia na existęncia de uma sociedade, composta por vários agentes que atuam no sistema por meio de cooperaçăo e concorręncia, sendo que é devido a esse “comportamento social” que emerge a inteligęncia do sistema. Assim, o objetivo maior dos pesquisadores em SMA está na coordenaçăo de tal comportamento social inteligente, uma vez que dita coordenaçăo envolve conhecimento, objetivos, habilidade e planejamento sobre os agentes e năo necessariamente está voltada para a busca da soluçăo de um problema específico, como é o caso da RDP.
Entăo, nesta abordagem a idéia consiste em coordenar o comportamento inteligente de um conjunto de agentes autônomos, cuja existęncia pode ser anterior ao surgimento de um problema em particular. Os agentes devem raciocinar a respeito das açőes e sobre o processo de coordenaçăo em si. As suas arquiteturas săo mais flexíveis e a organizaçăo do sistema está sujeita ŕ mudanças visando adaptar-se ŕs variaçőes no ambiente e/ou no problema a ser resolvido [OLI 96]. O termo agente, neste caso, designa uma entidade inteligente, agindo racional e intencionalmente em relaçăo aos seus próprios objetivos e ao atual estado do seu conhecimento. Já, pelo termo autônomo, entende-se que cada agente possui sua própria existęncia, a qual năo se justifica pela presença ou năo de outros agentes nem pela existęncia prévia de algum problema. Considera-se, portanto, como sendo um sistema no qual convivem vários agentes, que podem vir a colaborar entre si, mas năo necessariamente [TOM 96].
Segundo Álvares e Sichman [ALV 97], do ponto de vista de concepçăo do sistema, o SMA apresenta as seguintes características:
Uma vez que os agentes săo concebidos independentemente de um problema particular a ser resolvido, torna-se possível, a reutilizaçăo de tais componentes quando se desejar projetar aplicaçőes similares. Os agentes irăo instanciar dinamicamente as organizaçőes e interaçőes quando um problema for apresentado ao sistema. De certo modo, pode-se considerar que certas propriedades globais do sistema que eram totalmente pré-definidas pelo projetista na abordagem RDP, e que eram também ligadas ao modelo algorítmico subjacente, săo agora representadas de modo explícito e efetivamente utilizadas pelos próprios agentes do sistema. A figura 6 mostra a estrutura de um SMA segundo a concepçăo de Sichman [SIC 95]
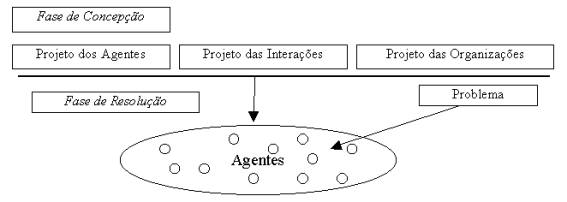
Figura 6: Estrutura de um SMA segundo Sichman
Quanto ŕ arquitetura, os SMA săo classificados de acordo com o tipo de agentes que os compőe, seguindo a mesma arquitetura apresentada inicialmente para os agentes (deliberativos, reativos ou híbridos) [ALV 97], sendo que: um SMA Cognitivo será composto por agentes complexos (agentes cognitivos ou deliberativos) que possuem um modelo de raciocínio, que planificam suas açőes e que negociam suas interaçőes com outros agentes; um SMA Reativo será composto por agentes simples (agentes reativos) que năo possuem nenhum modelo simbólico ou interno do seu ambiente e que agem utilizando um comportamento estímulo/resposta e, finalmente, um SMA híbrido, será uma junçăo das duas arquiteturas anteriores, ou seja, possuirá tanto agentes deliberativos quanto reativos interagindo na sociedade.
Sichman, Demazeau e Bossier destacam ainda alguns pontos importantes quanto aos SMA [SIC 92]:
| A decomposiçăo das tarefas é realizada pelos agentes; | |
| Como os agentes săo autônomos, com seus próprios objetivos individuais, conflitos podem surgir com facilidade; | |
| É necessária uma comunicaçăo complexa entre os agentes; | |
| Os agentes podem trabalhar em outros problemas; | |
| SMA é um enfoque de sistemas abertos; | |
| O ambiente pode sofrer alteraçőes, sendo um agente um elemento adaptável, alterando sua representaçăo interna do mundo. |
Conforme a ilustraçăo do agente deliberativo genérico, apresentada no início deste texto (figura 2), Demezeau e Müller [DEM 90] realizam uma classificaçăo dos tipos de interaçőes entre dois agentes dentro de um sistema multiagente como sendo:
| Fortes: quando envolvem interaçőes entre a capacidade de decisăo, possibilidades e conhecimento do outro agente sendo considerado. Ocorrem por meio de sofisticados protocolos para informar, efetuar requisiçőes e convencer; | |
| Médias: quando relacionam, respectivamente, conhecimento e possibilidades de um agente com o conhecimento e possibilidades do outro agente. Săo interaçőes realizadas a nível de capacidade de raciocínio e ocorrem quando um agente simplesmente tenta considerar o que o outro deseja realizar; | |
| Fracas: quando os modelos de agentes estăo relacionados apenas por meio do conhecimento.A interaçăo ocorre somente através de alteraçőes no mundo exterior, mediante o envio de mensagens ou modificando o ambiente. |
Os SMA vem sendo utilizados nos mais diversos domínios entre os quais [WOO 96], [JEN 98, 95], [MAE 94]:
| Ampla gama de aplicaçőes industriais (controle de processos. Ex: ARCHON); | |
| Controle de tráfego aéreo (Kinny et all 1996 apud [JEN 98]): OASIS - sofisticado sistema de controle de tráfego aéreo baseado no paradigma multiagente, utilizado no aeroporto de Sydney, Austrália, no qual os agentes assumem o lugar dos aviőes em operaçăo; | |
| Gerenciadores de informaçăo (Maxims, Newt); | |
| Comércio eletrônico: um dos muitos exemplos é o Kabash. Um sistema que cria agentes de compra e venda e as transaçőes săo realizadas pela interaçăo entre esses agentes (Chavez and Maes 1996 apud [JEN 98]); | |
| Aplicaçőes médicas (GUARDIAN: sistema de monitoraçăo de pacientes em UTI pós operatória monitoraçăo de pacientes desenvolvido por (Hayes-Roth et al., 1989 apud [JEN 98]); | |
| Entretenimento (jogos como o Quake e ainda teatro e cinema interativos); |
Entre outras tantas aplicaçőes, como:
Além disso, algumas das principais aplicaçőes de agentes no que tange a área da informaçăo săo listadas a seguir, sendo que diversas já estăo disponíveis e outras ainda se encontram em fase de desenvolvimento:
![]()
Limitaçőes dos Sistemas Baseados em Agentes
Embora a tecnologia de agentes tenha um papel importante no desenvolvimento de aplicaçőes computacionais, năo deve ser superestimada. A maioria das aplicaçőes que usam agentes atualmente, poderiam ser construídas usando técnicas năo-agente. Assim o mero fato que um domínio particular do problema possui origens de dados distribuídas năo implica necessariamente que uma soluçăo baseada em agentes seja a mais apropriada.
Como em todo projeto de sistema, a escolha final é ditada por muitos fatores. Aqui săo apresentadas algumas situaçőes em que o paradigma de aplicaçăo baseada em agentes deve ser bem pensado antes de sua utilizaçăo. Por exemplo, devemos notar que a natureza do enfoque em agentes cria uma quantidade de problemas comuns a todas as aplicaçőes baseadas em agentes [JEN 98]:
![]() Nenhum
controlador total do sistema. Uma soluçăo baseada em agentes pode năo ser
apropriada para os domínios em que os vínculos globais tęm que ser mantidos,
nos domínios onde uma resposta tempo-real deve ser garantida, ou nos domínios
em que os becos sem saída ou os travamentos devem ser evitados;
Nenhum
controlador total do sistema. Uma soluçăo baseada em agentes pode năo ser
apropriada para os domínios em que os vínculos globais tęm que ser mantidos,
nos domínios onde uma resposta tempo-real deve ser garantida, ou nos domínios
em que os becos sem saída ou os travamentos devem ser evitados;
![]() Nenhuma
perspectiva global: As açőes dos agentes, por definiçăo, săo determinadas
pelo estado local dos agentes. Entretanto, desde que em quase nenhum sistema
realista do agente, o conhecimento global completo é uma possibilidade, isto
pode significar que os agentes fazem decisőes globais sub-ótimas;
Nenhuma
perspectiva global: As açőes dos agentes, por definiçăo, săo determinadas
pelo estado local dos agentes. Entretanto, desde que em quase nenhum sistema
realista do agente, o conhecimento global completo é uma possibilidade, isto
pode significar que os agentes fazem decisőes globais sub-ótimas;
![]() Confiança
e delegaçăo. Para que os usuários estejam de acordo com a idéia de delegar
tarefas aos agentes, devem primeiramente confiar neles. Os usuários tęm que
adquirir confiança nos agentes que trabalham em seu interesse, e este processo
pode levar bastante tempo. Deve-se atentar para que o agente năo exceda a
sua autoridade com relaçăo ao usuário ou organizaçăo; um agente deve saber
suas limitaçőes.
Confiança
e delegaçăo. Para que os usuários estejam de acordo com a idéia de delegar
tarefas aos agentes, devem primeiramente confiar neles. Os usuários tęm que
adquirir confiança nos agentes que trabalham em seu interesse, e este processo
pode levar bastante tempo. Deve-se atentar para que o agente năo exceda a
sua autoridade com relaçăo ao usuário ou organizaçăo; um agente deve saber
suas limitaçőes.
É interessante traçar alguns paralelos entre a IAD e as diferentes organizaçőes sociais existentes no mundo real, sejam elas humanas ou de outros animais (sociedades de médicos, formigas ou abelhas, por exemplo).
Da mesma forma como a Sociologia é aqui apresentada como tendo objetivos distintos da Psicologia e Biologia, a IAD clássica também tem seu foco dirigido ao estudo dos fenômenos resultantes das interaçőes entre agentes distintos, e năo apenas com as propriedades de uma entidade inteligente em particular.
Como resultado da analogia entre Sociologia e IAD, a apresentaçăo de metáforas inspiradas em fenômenos de processamentos que acontecem no mundo natural é constante no contexto da IAD. Kornfield e Hewitt [KOR 88] realizaram um trabalho interessante, intitulado de “metáfora da comunidade científica”, onde apresentam que, quando objetiva-se desenvolver algo capaz de realizar determinado processo, tal como resoluçăo de problemas, é freqüente, no contexto da engenharia, que primeiramente se estude sistemas que ocorrem naturalmente e que já implementem tais processos. A partir disso, e da observaçăo de que as comunidades científicas provaram ser bem sucedidas em resolver problemas, eles realizaram uma análise de como isto acontece nestas comunidades.
As principais observaçőes sobre estas comunidades săo:
Portanto, concluiu-se que a diversidade observada é o aspecto crucial para o sucesso da pesquisa científica. Esta característica do alto grau de paralelismo das comunidades científicas, é o principal ponto da metáfora para os sistemas computacionais e que é utilizado como um dos fundamentos da IAD.
A partir das análises, foi desenvolvida uma linguagem que incorporava elementos geradores de hipóteses, elementos adeptos, refutadores e também elementos responsáveis pela alocaçăo de recursos. Os resultados experimentais comprovaram as suposiçőes apresentadas na proposta do trabalho.
Outra metáfora, um tanto mais simplista mas năo menos eficiente na hora da implementaçăo e verificaçăo de resultados, é a da comunidade de formigas, a qual é composta por agentes relativamente simples, subdivididos em grupos com características individuais e capacidades diferentes (operárias, guerreiras,...), grupos estes que irăo interagir na busca de um objetivo comum (no caso das formigas, a sobrevivęncia da comunidade). Esta metáfora se baseia entăo em uma sociedade de agentes reativos na qual cada agentes em particular é bastante simples e considerado sem inteligęncia. Entretanto, as tarefas realizadas pela sociedade săo complexas e demonstram que sua organizaçăo, somada as açőes de cada indivíduo, produzem um modelo considerado inteligente.
Várias outras metáforas tem sido utilizadas năo somente para inspirar os trabalhos em IAD, mas também para definir metodologias, técnicas e ferramentas próprias, tanto que Star [STA 89] propőe a substituiçăo, para os sistemas de IAD, do “Teste de Turing” pelo que chamou de “Teste de Durkheim”, onde os sistemas seriam testados em relaçăo a suas habilidades em atingir objetivos comunitários. [TOM 96]
![]()
| [ALO 97] |
ALONSO, Eduardo. Inteligencia Artificial Distribuida: Cómo entenderla y usarla. Revista online “La Naturaleza de la Luz” http://www.arrakis.es/~jjreina/revista |
| [ALV 97] | ÁLVARES, L. O.; SICHMAN, J. S. Introduçăo aos Sistemas Multiagentes. In: JAI, XVII Congresso da SBC, Brasília (DF), 1997. |
| [BER 96] | BERNEY, B. Software Agents – A Review.Manchester Metropolitan University.1996. |
| [BON 88] | BOND, A.H. and GASSER, L. Readings in Distributed Artificial Intelligence. Morgan Kaufmann, San Mateo (CA), 1988. |
| [DAM 96] | DAMÁSIO, Antônio. O Erro de Descartes: Emoçăo, razăo e cérebro humano. Săo Paulo: Companhia das Letras, 1996. |
| [DEM 90] | DEMAZEAU, Yves & MÜLLER, Jean-Pierre. Descentralized Artificial Intelligence. Proceedings of the First European Workshop on Modeling Autonomous Agents in a Multi-Agent World. Cambridge: North-Holland, 1990 |
| [DUR 94] | DURFEE, E. H.; ROSENSCHEIN, J. S. Distribuited Problem Solving and Multi-Agent Systems: Comparation and Examples. In International Workshop on Distributed Artificial Intelligence, 1994. |
| [FER 98] | FERNÁNDEZ, Carlos Ángel Iglesias. Definición de una Metodología para el Desarrollo de Sistemas Multiagente. Tese de doutorado. Departamento de Ingenieria de Sistemas Telemáticos, Universidad Politécnica de Madrid, Jan., 1998. |
| [FRA 96] | FRANKLIN, S; GRAESSER, A. Is it an Agent, or just a Program?: A Taxonomy for Autonomous Agents. Proceedings of the Third International Workshop on Agent Theories, Architectures and Languages. Springer-Verlag. 1996. |
| [GAR 95] | GARDNER, Howard. Inteligęncias Múltiplas: Múltiplas Perspectivas. Porto Alegre: Artes Médicas, 1995. |
| [GOD 98] | GODOY, Norton. Entrevista com Marvin Minsky - Revista IstoÉ -10 de junho de 1998 |
| [JEN 98] | JENNINGS, N.; WOOLDRIDGE, M. Agent Technology - Foundations, Applications, and Markets. Springer-UNICOM. 1998. |
| [KOR 88] | KORNFIELD, W.A.; HEWITT, C. E. The scientific community metaphor. In: Readings in D.A.I. Edited by Alan Bond e Les Gasser San Mateo, California, USA. Proceedings..., Morgan Kaufman, 1988. |
| [MAE 94] | MAES, P. Modeling Adaptive Autonomous Agents. Artificial Life Journal, v.1, n. 1&2, p.135-162. MIT Press. 1994. |
| [MAT 99] | MATURANA, Humberto Romesín; Da Biologia ŕ Psicologia. Porto Alegre: Artes Médicas, 1999 |
| [NWA 96] | NWANA, H. S. Software Agents; na Overview. In: Knowledge Engineering Review. Vol. 11(3) pp. 1-40. Cambridge University Press, October/November 1996. |
| [OLI 96] | OLIVEIRA, F.M. Inteligęncia Artificial distribuída. In: IV ESCOLA REGIONAL DE INFORMÁTICA, Londrina-Itajaí-Canoas, Brasil, Abril 1996. |
| [RUS 95] | RUSSELL, S.; NORVIG, P. Artificial Intelligence: A Modern Aproach. Prentice Hall. 1995 |
| [SIC 92] | SICHMAN, J.; DEMAZEAU, Y.; BOISSIER, O. When can knowledge-based systems be called agents? In XII Congresso da Sociedade Brasileira de Computaçăo, IX Simpósio Brasileiro de Inteligęncia Artificial, p. 172-185, 1992. |
| [SIC 95] | SICHMAN, Jaime Simăo. Du Raisonnement social chas les Agents: Une Approche Fondée sur la Théorie de la Dépendance. Tese de doutorado. Laborateire d’Informatique Fondamentale et d’Intelligence Artificielle, Institut National Polytechnique de Grenoble, Set., 1995. |
| [STA 89] | STAR, S. L. The Structure of III-Structured Solutions: Boundary Objects and Heterogeneous Distributed Proble Solving. In: GASSER, L. & HUHNS, M.N. Distributed Artificial Intelligence II. San Mateo, California: Morgan Kaufmann Publishers, 1989. pp 37-54. |
| [TOM 96] | TOMINAGA, Paulo. Processo de Negociaçăo em Sistemas Multi-Agentes: Modelagem e Análise com Redes de Petri. CPGCC / DCC / ICE / Universidade de Brasília, 1996. Dissertaçăo de Mestrado. |
| [VAL 98] | VALENTE, Célia Talma Martins de Pinho. SMAPI – Sistema Multi-Agente de Pesquisa Inteligente. Tese de mestrado. Faculdade de Engenharia da Universidade do Porto. 1998. |
| [WOO 94] | WOOLDRIDGE, M. Coherent social action. In Proc. ECAI-94, pp. 245-250, 1994. |
| [WOO 95] | WOOLDRIDGE, M. & Jennings, Intelligent Agents: Theory and Practice, 1995. |
| [WOO 96] | WOOLDRIDGE, M.; JENNINGS, N. Software Agents. IEE Review, p.17-20. 1996. |
| [YEP 01] | YEPES, Igor. Inteligęncia Artificial Distribuída: Uma Abordagem ao Comportamento Social Inteligente, CPGC / UFRGS, 2001. |
Página Principal
Noções Básicas
Algoritmos Genéticos
Redes Neurais Multiagentes
Cognição Software
Artigos Tutoriais
Links Quem
sou eu