
|
Vinayak Senior Under - Graduate Student Department of Mechanical Engineering Punjab Engineering College, Sector - 12 U.T. Chandigarh - 160012 India Phone: +91-9888581221 Email: vinayak.pro@gmail.com |
COMPLETED:
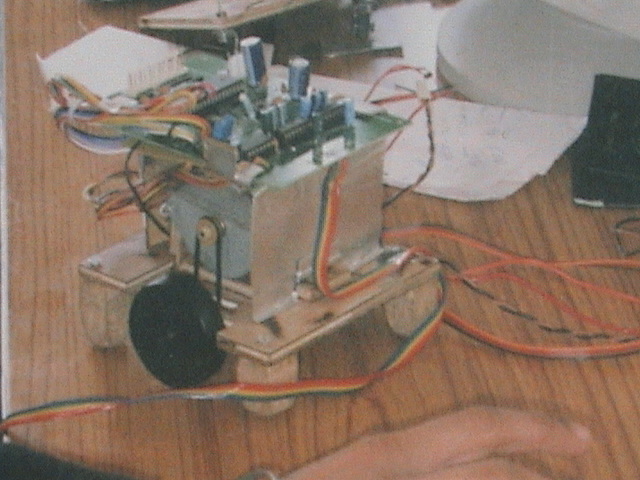
Feb. 2004 - Fabrication of a Wheeled Autonomous Robot programmable for any 2-D Path. (Abstract)
(Competed at Techkriti-2004, Team Members: Himanshu Sachdeva, Hemant Vohra)

May/ June 2004 - Leg Design and Kinematical Analysis for an Under-actuated Quadruped (Report)
Project Guide: Dr. Bhaskar Dasgupta, Center for Robotics and Mechatronics, Department of Mechanical Engineering, Indian Institute of Technology, Kanpur, India
Feb. 2005 – Fabrication of wheeled line following robot
(Team Member: Himanshu Sachdeva)
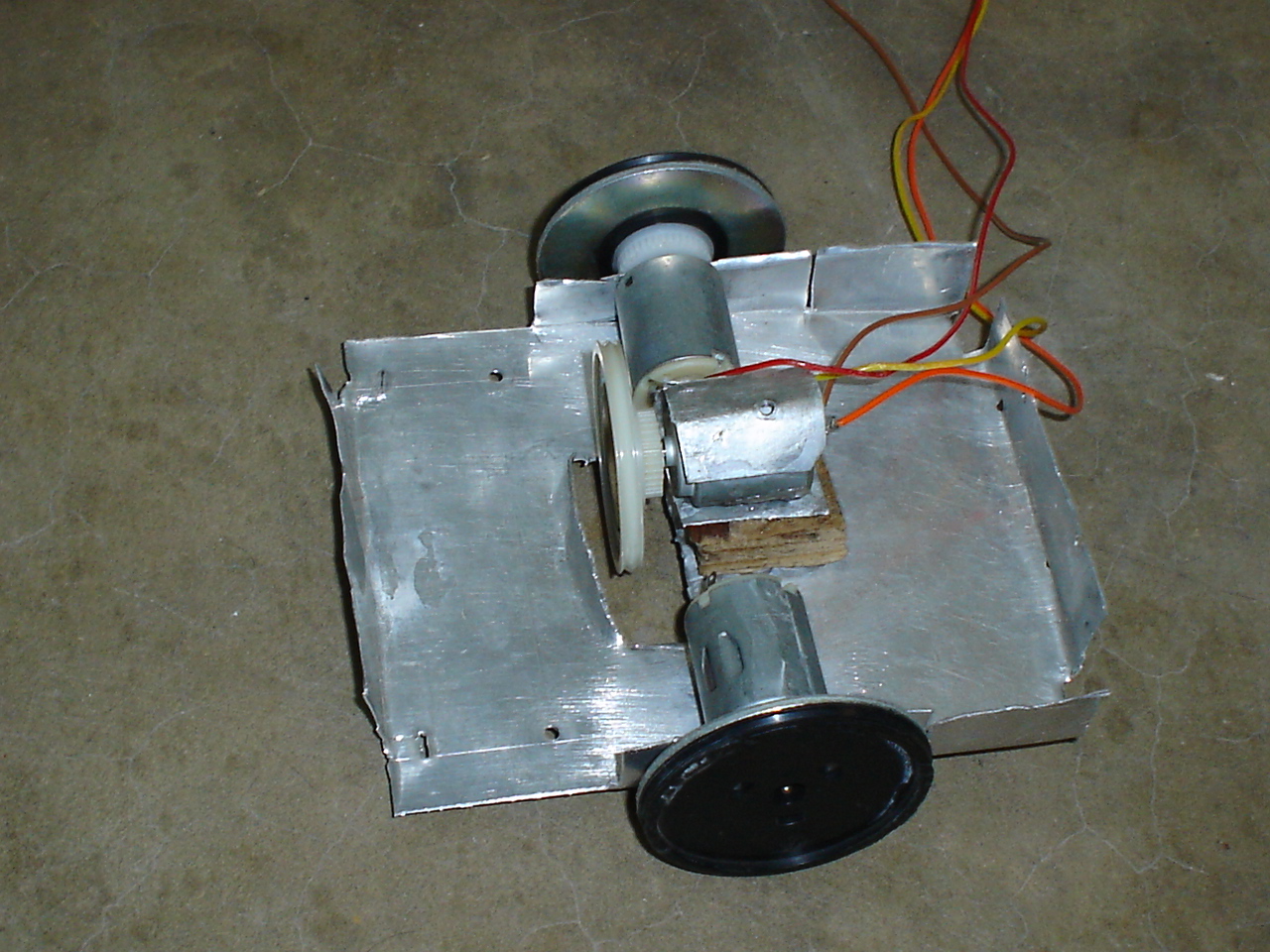
Mar. 2005 – Experimentation for achieving stability of a two-wheeled setup using Gyroscope (Zip file)
(Team Members: Rahul Mukhi and Pulkit Kapur)
April 2005 – Fabrication of a R/C Power Boat
(Competed at Elements 2005. Team Members: Anuj Madan, Yogesh Babbar, Rajan Arora)
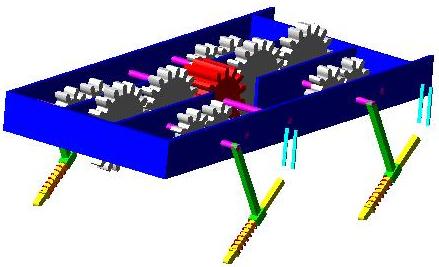
May/ June 2005 – Study of a Single actuator Hexapod Robot for Steering Capabilities using ADAMS
Project Guide: Dr. Dibakar Sen, Department of Mechanical Engineering, Indian Institute of Science, Bangalore, India

August 2005 - Development of a demonstrational working model of a manually controlled hydraulically operated robotic manipulator. (Pictures)
(Team Member: Pulkit Kapur)

November 2005 - Mechanical Design and Development of a Surgical Robotic Manipulator.
(Joint Venture, Robotics Club & Center for development of advanced computing)
May 2006 - Design, optimization and fabrication of a manually steered single actuator hexapod vehicle with mammal type leg configuration. (Abstract)
Project Guide: Dr. Arun K. Lall, Dean – Research, Planning & Development, Punjab Engineering College, Chandigarh, India

CURRENT :
Design of a mechanically operated master-slave alternative as an implementation of force multiplication technique for any 3D curve in space.
(Independent Theoretical Project)
Experimentation on Dynamic walking with use of gyroscopic couple on a spring-mass system.
(Under the Banner of Robotics Club, Punjab Engineering College)
Design and development of a tele-maniplulation setup for a master-slave pair with completely different mechanical structures.
(Under the Banner of Robotics Club, Punjab Engineering College)
Design and fabrication of Single actuator Hexapod Robot with Insect-type leg configuration with ability to move on both the faces (Top and Bottom)
(Under the Banner of Robotics Club, Punjab Engineering College)
 (Incomplete Prototype !!)
(Incomplete Prototype !!)
Design and development of a manually operated bipedal exoskeleton with application as prosthetic lower limbs in addition to bipedal motion amplification.
(Under the Banner of Robotics Club, Punjab Engineering College)